Hi!
How does your diagnostic page in WL UI look like?
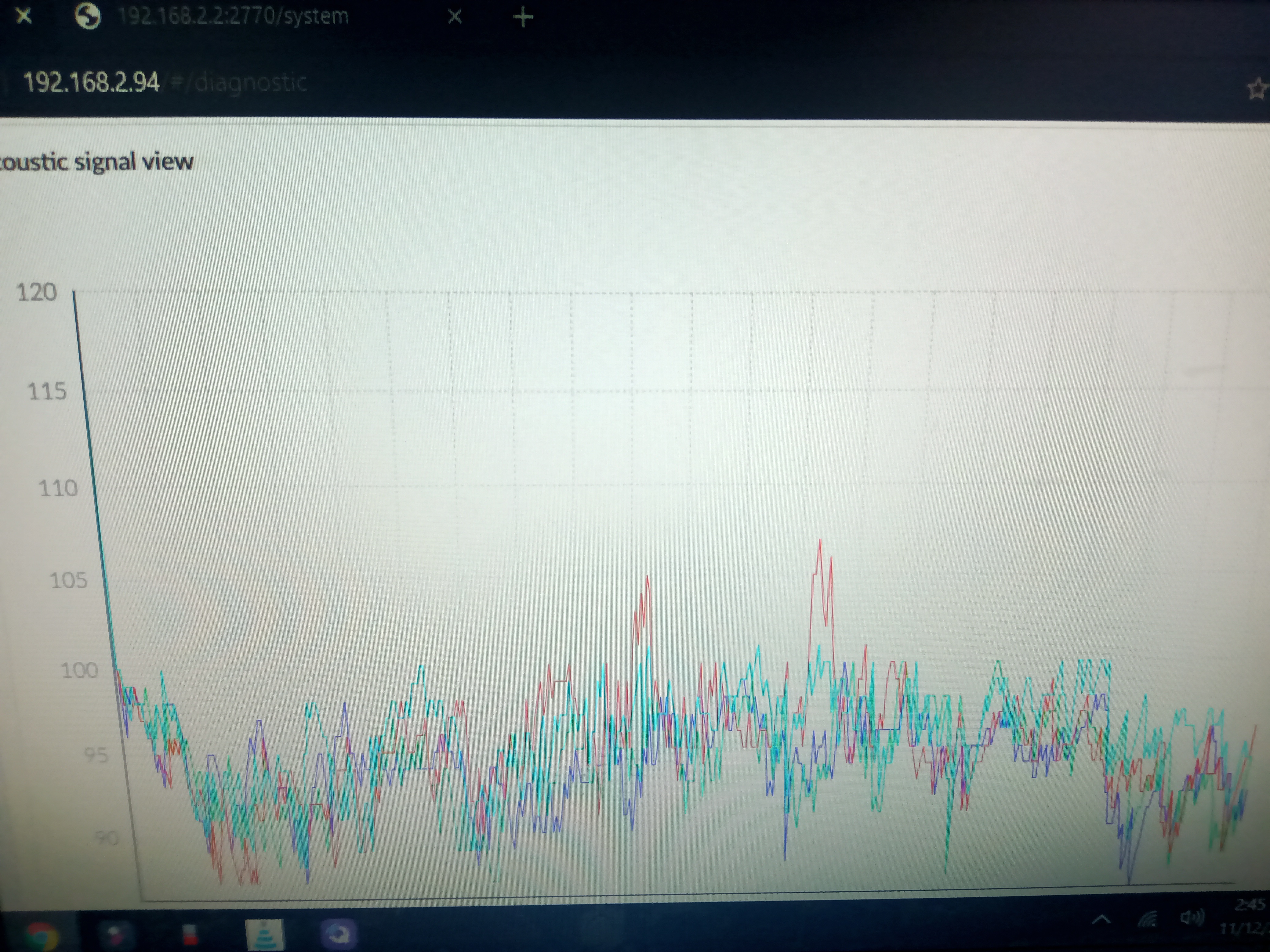
Specially the diagram of receiver levels
Also, does the depth on the WL UI in your screen above show the correct depth if you scroll down?
Thanks for your response.
The diagnostic page shows waveform signals from 4 receivers. When I put my ROV having locator near to any one receiver its waveform shows some peak. The level are sometimes high and sometimes low on Y-axis.
Regarding depth, previously I have a error of depth but after restarting the online page of waterlinked on companion software it is removed now. How can I check the depth reading?
I check the depth and it looks good and accordingly with the BlueROV but the GPS location on the GUI remain stationary and rotating at a fixed position.
The diagnostic page shows noise signals from all receivers and when I put locator near to any receiver it shows peaks from that receiver and no response from other receivers.
Please find the pictures of the diagnostic page attached below.
When the locator is in contact with any receiver there is no peak but when it is close to any receiver it shows abrupt peaks from respective receiver.
Hi!
As you said there is at best signal from one receviever at a time.
Some resons:
-Are really all receivers and transmitter in water (Sorry for stupid question)
-Check error page in WL user UI (Button in top of page)
-Correct choice of transmitter type in WL user UI
-If using transmitter U1 or S1, do it have GPS satelite connection (green LED on transponder)
-Something wrong with connection from transmitter to WL electronics
-Faulty transponder
I am not using the FXTI board offered by BlueROV as my ROV was ordered before BlueROV offered it with the ROV instead I directly connect the wires as shown in the BlueROV integration page.
Does it effects the result. If yes how can I use the waterlinked GPS without FXTI board.
Hi!
As long as the ROV/Companion, the Topside computer and the Waterlinked system is on the same network and talking to each other, the way of network do not matter.
Since you can reach the waterlinked UI from topside, and the depth in UI is correct, then all three systems must work correctly already.
The locator wires are directly connected to the one pair of tether which moves through 300m tether and then ends up in the Electronics board without any in between booster signal conditioner or Fathom.
My question is that can it takes the data for such a long distance without any signal conditioning.
Hi!
One of my systems run exact like that without problems.
BR tether 300 meter, Waterlinked A1 transponder.
Works with both Waterlinked Gen1 and Gen2.
And i am sending 240V AC in the same cable…
Still you could have connection problem.
If you have tether connector, you can try making a short “pool cable” just to test.