I just finished the BlueROV2 Heavy build, with 4 Lumen lights and the Newton Gripper. I am having three separate issues.
It appears that one of the servo leads is plugged into the Pixhawk backwards (but I want confirmation).
The tilt for the camera does not work.
The video on QGroundControl intermittently gets blanked out with a gray screen.
Problem 1. Attached is a picture of the Pixhawk inputs. It appears as if there is a servo lead plugged into Aux 6 upside down (the signal is connected to the ground rail, and the ground is connected to the signal input). Am I correct, or is the wire color convention ignored on this particular servo lead? I would just flip it around, but want confirmation that it is incorrect first. What is this servo lead connected to?
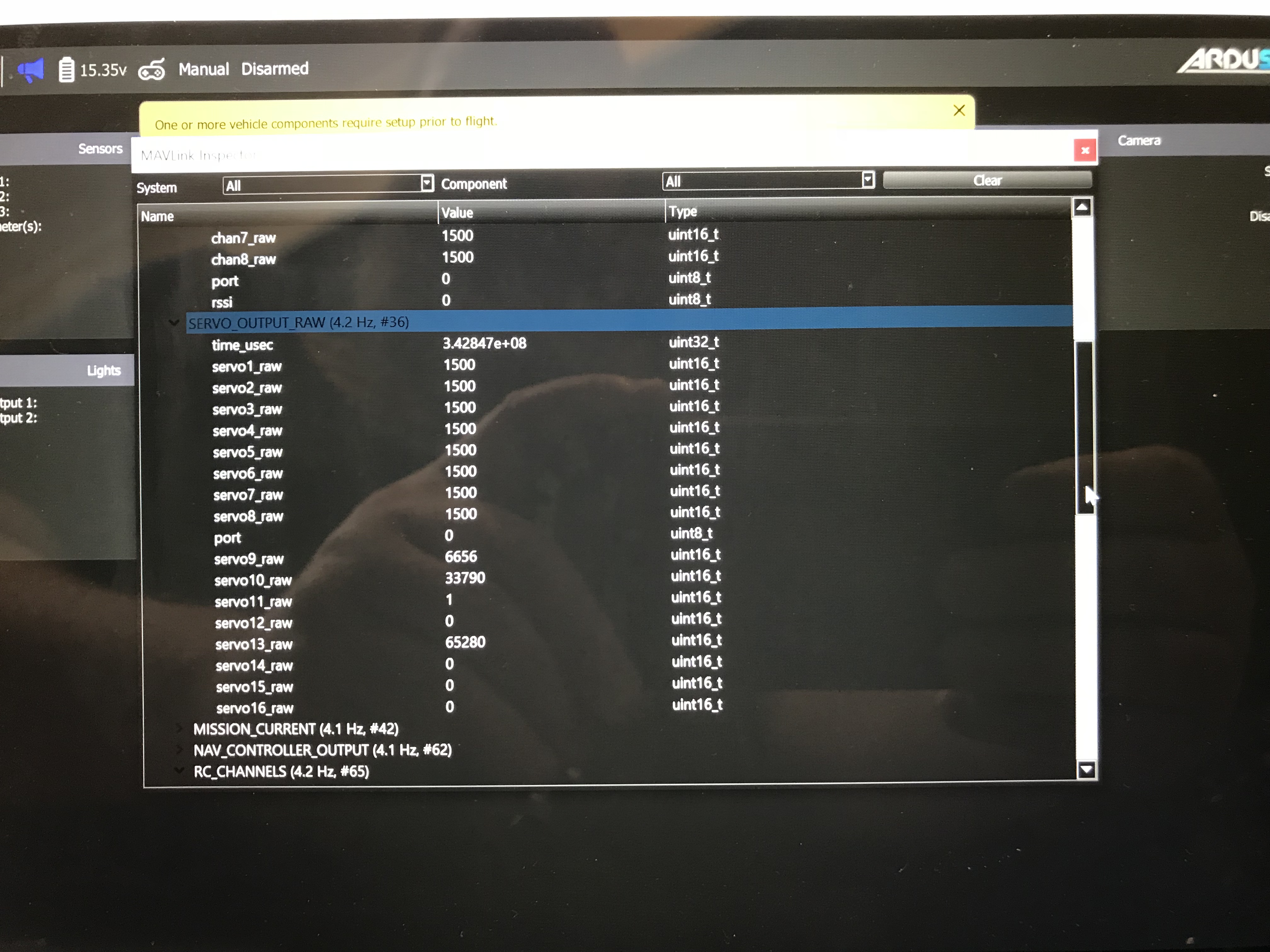
Problem 2. The camera gimbal is setup on channel 10 by default. But will not move when the joystick button assignments are setup per the list for the Newton Gripper (Button 9+shift=mount_tilt_down, Button 10+shift=mount_tilt_up) I have screenshots from Widgets>Mavlink Inspector that might help. (RC Channels Raw, RC Channels, Servo Output Raw 1, Servo Output Raw 2). The Servo Output Raw 1 and 2 show two different versions of the same screen. servo9_raw through servo16_raw shift back and forth between, what appear to me to be nonsensical values represented in these two images.
Problem 3. The last problem is that my video feed intermittently turns gray for a second, and then reverts to normal video, and continues this cycle as long as the ROV is plugged in. I have included a video of this behavior. I did not think to look to see if the timing of the interference coincided with the strange value shift in the widget Servo Output Raw.
Any help that you can give would be greatly appreciated.
The following might help you with your video issue:
Like your video feed issue, my video feed intermittently turned gray for a few seconds, and then reverted to normal video, and continued like that as long as the ROV was plugged in.
I am using an older HP laptop that only has a 1024X768 display and I guess that the cpu and video processor could not accommodate the 1080p video data stream. Going to 192.168.2.2:2770/camera and setting the video Frame Size to 1024X768 resolved the issue. The video is now stable and very sharp.
I am going to buy a new laptop this weekend and have been looking at HP laptops with I3, I5, and I7 processors and it seems that only the HP laptops with the I7 processors have the 1440X1080 graphic displays.
It looks like a fairly fast laptop is necessary to view the 1080p video stream.
Update:
I purchased a HP I7 laptop with a fast video processor this last weekend and was able to view the video stream at both 768p and 1080p resolution without any disruption of the video stream.
Thanks for the advice on the screen blanking. It was indeed a laptop issue. I lowered the resolution by one setting (the actual resolution escapes me at the moment), and the picture came in perfect and consistently. I am now migrating to a more powerful laptop to run at full resolution.
Jacob, thanks for your help in the remote session. For those who might read this in the future:
The servo lead in the Aux6 position was plugged in upside down. This is the leak detection sensor, and would have given a false negative (would never detect a legitimate leak). I flipped it over and Jacob tested it by changing the ‘true’ condition in the QGroundControl interface. (Test by choosing ‘Alarm on high’, instead of ‘alarm on low’. It should give a leak alert when changed to ‘alarm on high’. Close the alert, and change back to ‘alarm on low’ for normal operation.)
The tilt camera did not work because I had plugged the BEC into the RC IN on the Pixhawk instead of the SBUS port. Apparently the 3DR Pixhawk manual is incorrect in its illustration when it depicts the power rails running completely from one side to the other. As soon as I unplugged the BEC from the RC IN port, and plugged it into the SBUS port, the gimbal immediately started working.
The video blanking was the result of insufficient CPU power in my laptop. As soon as I lowered the resolution, the problem went away.