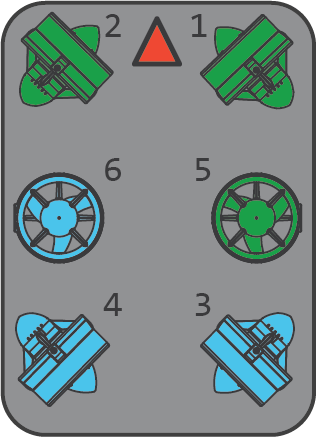
Hi Antonio. I believe the thrusters are configured to properly cancel torque right now. Here’s a picture of the default thruster layout on the ROV.
In this picture, the yellow circled thrusters (1 and 4) are in the same axis but are counter rotating so they cancel torque. The blue ones (2 and 3) are similar. If the colors matched rotation directly, then the torque would not be canceled and you would have coupled motion.
Note that the yellow and blue thrusters are perpendicular to each other, so the torque from yellow does not affect blue and vice versa.
Now looking from front back and each side will have two counter rotating. In your configuration the front is not cancelling torque and the and back have same in other direction…
Hi Antonio, okay. I think you should look at the ROV from 45 degree angles, not from side or front. When looking from 45 degrees, you see the thrusters that are in the same axis and should be counter-rotating.
In this configuration, 1 cancels the torque from 4 and 2 cancels the torque from 3.
Hi Antonio, okay. In our configuration the torque is completely canceled when going forward or sideways and is mostly canceled in all other situations.