I am currently using the Bar30 pressure sensor provided by you guys. It is connected directly to the i2c port of a pixhawk 1 running ardusub. I have used this sensor and set up for a year now. However, recently whenever I try to calibrate the pressure sensor I am getting that the depth sensor is not detected.
To ensure it is not the sensor at fault, I have tried another Bar30 sensor on hand and it also will not work.
Any advice on how to resolve this issue would be appreciated.
Hi,
I’m also having the same issue here. What I have experienced is the following:
At the beggining of an inmersion I see depth information in the QGC/Cockpit overlay
After some time, this information stops appearing and “depth sensor error” messages pop up
Disconnecting and reconnecting the battery doesn’t solve the issue. I only start seeing depth data again after a few days.
when recieving depth information, it’s not detected on the “Sensors” section in QGC (see image). MS5837 is selected under parameter BARO_PROBE_EXT, as it should.
As suggested in the forum, I checked the wiring and I believe everything is looking as it should
The sensor has been dried for more than 2h per day as the documentation specifies
The Bar30 is connected through an I2C Bus Splitter. I’ve tried connecting it directly to the pixhawk
I’ve seen the same behaviour after trying with another bar30 (from another ROV)
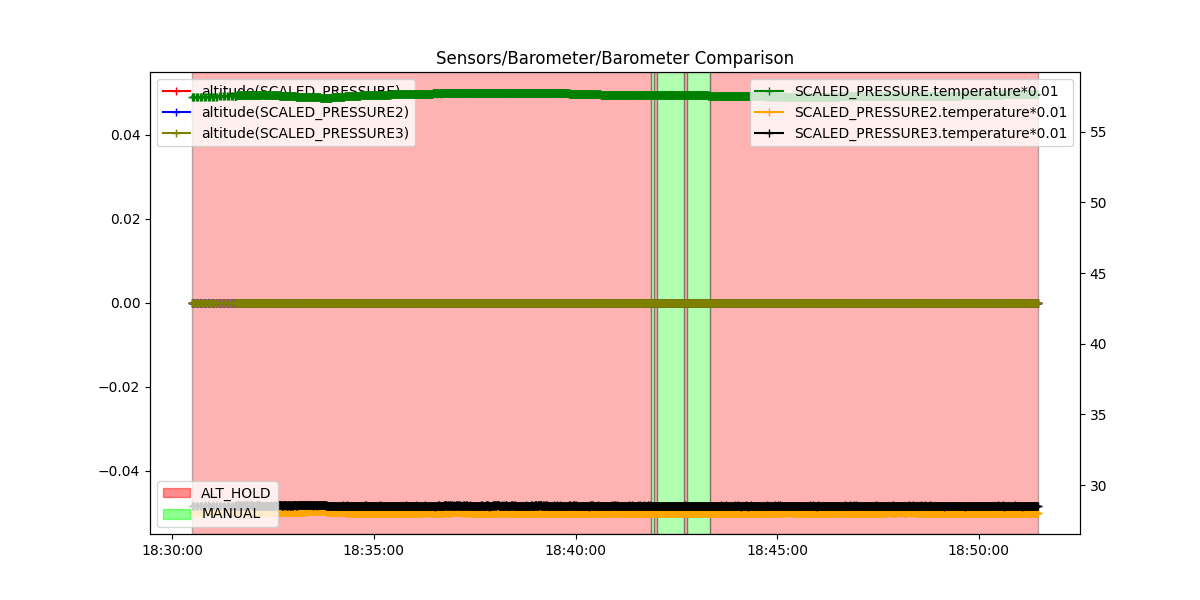
My main question is: why am I able to see depth data and use “Depth Hold” mode, but not receive altitude (SCALED_PRESSURE2) information? We need both the depth information and this flying mode for our surveys.