We are super excited to utilize Cockpit on our 1000m BlueROV! I’m having trouble getting video to be displayed. It doesn’t seem like the defaults of under the “General Configuration” menu for Mavlink2Rest and WebRTC are able to connect and I get the message “failed to connect”. I do get some telemetry such as battery voltage/curent and depth. The ROV works perfectly with QGC… Any help would be appreciated!
Hey Stephen! Nice to hear from you!
Could you get a screenshot from your BlueOS video stream page (http://blueos.local/vehicle/video-manager)?

Cool. This screenshot is fine.
Can you now go to Cockpit, open the edit-menu, click on the configuration button (cog) for the Video Player widget and see if the stream is available there?

Definitely.
I will take a look here and also check with the ones responsible for the video streams to see if they have an idea on what is happening.
In the meantime, can you check if changing the stream from UDP to RTSP helps with the problem?
And just to better understand the problem, how’s your setup right now? Direct ethernet connection? WiFi router? ZeroTier? And which BlueOS version are you running?
Wait Stephen, I think I know what the problem is ![]()
From the screenshot I can see that you’re running BlueOS 1.0.1. This version does not have breaking changes that were introduced at the begging of the year on the video stream pipeline.
Can you update BlueOS to the latest stable and check if it solves the problem?
I’m connected through Zerotier so that could add some complexity. Its connected via ethernet.
Changing to RTSP did not help.
I’m running BlueOS v.1.1.1

Oh, I was looking at the Boostrap version. My bad.
v1.1.1 is fine, so this is not the problem.
@hube268 the telemetry data (which can be seen on the widgets) is coming on a good update-rate or they are lagging/inconsistent? I’m taking a look at the code and maybe it’s a timeout issue (Cockpit was expecting an answer from the camera manager but it did not came in time).
telemetry does not lag. When I move/tilt the ROV the horizon moves immediately in cockpit. I’m not in the water so couldn’t tell you about depth.
Ok.
I will send you a DM so we can schedule a call and I can take a better look at the problem.
With a stable source of power, and when not testing beta versions, it’s always a good idea to update bootstrap! If not, sometimes power cycling the vehicle can cause BlueOS to revert to the older, bootstrap version…
We got it to work!
Following is a post-mortem:
We found out that everything was working when I connected from my laptop to Stephen’s zerotier, and them we also found out that everything worked when Stephen connected to the ROV from another laptop or from an incognito window on the original desktop.
We reset chrome settings on Stephen’s desktop and everything worked, so my guess is that there was some flag on chrome://flags that was blocking the connection. Stephen confirmed to have done some configuration there to get another application working. Unfortunately we don’t know exactly which flag was it, but problem something related to WebRTC.
Hello just starting out and cannot get the video up not sure where to start ![]()
Hi @grahammalyon -
Welcome to the forums!
Happy to help, but we’re going to need more info! What kind of vehicle are you trying to use? What version of BlueOS and Cockpit have you got installed? Are any video streams present on the
page in BlueOS? You’ll want to configure /dev/video2 for a RTSP or UDP stream, H264 only, to get things going…
Hi @tony-white Thank you for getting back to me so fast sorry for slow reply. This is a new thing for me my work has bought an already built sub from RS aqua I am based in the UK at the University of Portsmouth at the institute of marine sciences. The idea is that the students can use this to do underwater survey etc. But first I need to get it working and understand how to use it!
Blue OS is 1.4.2
Cockpit 1.16.0
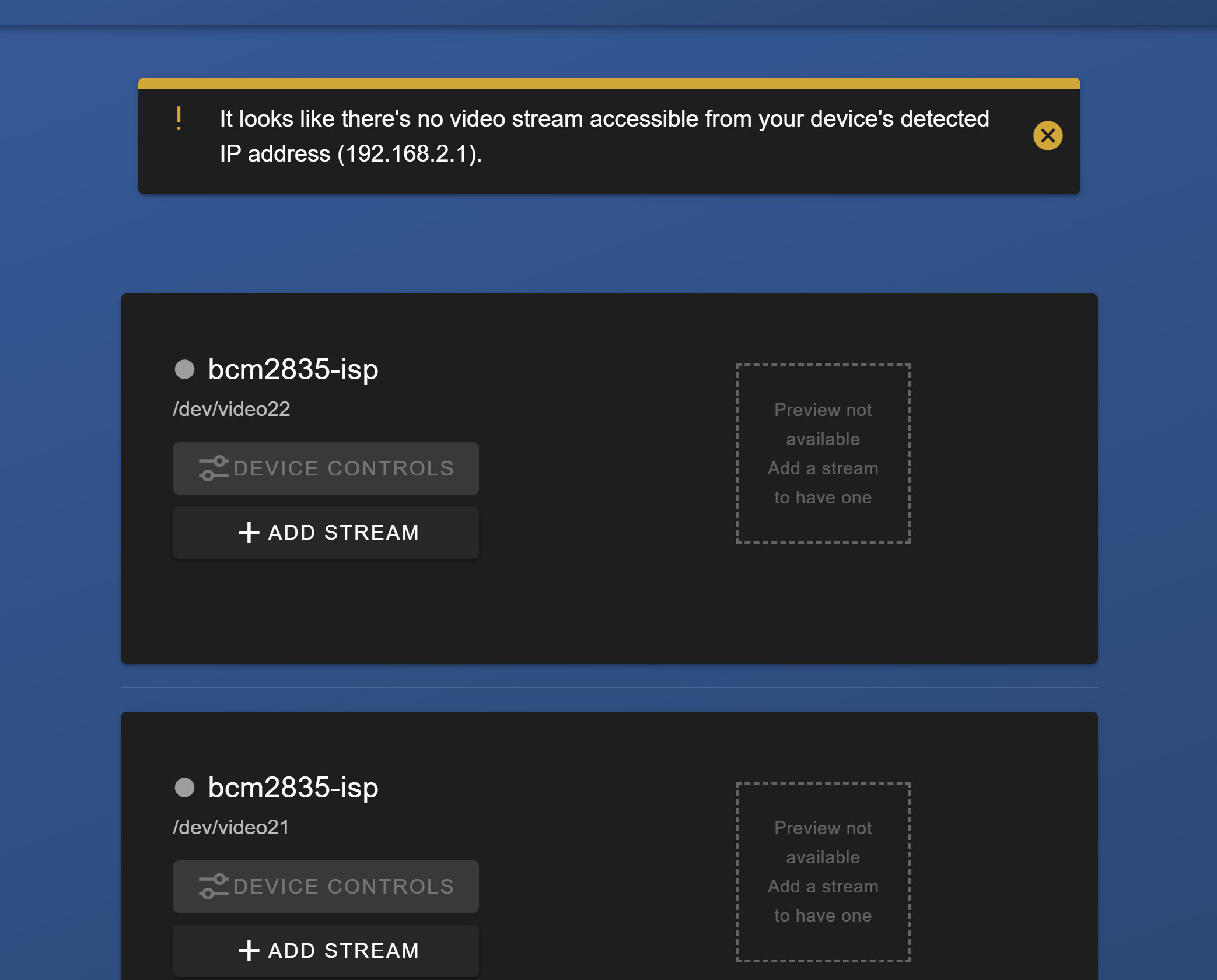
No streams and error message reads:
It looks like there’s no video stream accessible from your device’s detected IP address (192.168.2.1).
How do I configure the streams ?
Thank you in advance sorry for my lack of knowledge.
Hi @grahammalyon -
No problem. If you scroll down on the video streams page, you should be able to add a stream for the /dev/video2 device (H264 ,1080p, 30fps, and UDP should be fine.)
Once you’ve setup the video stream, both QGroundControl and Cockpit ground control stations should connect and let you see the live video stream.
Definitely checkout the operators guide to get started.