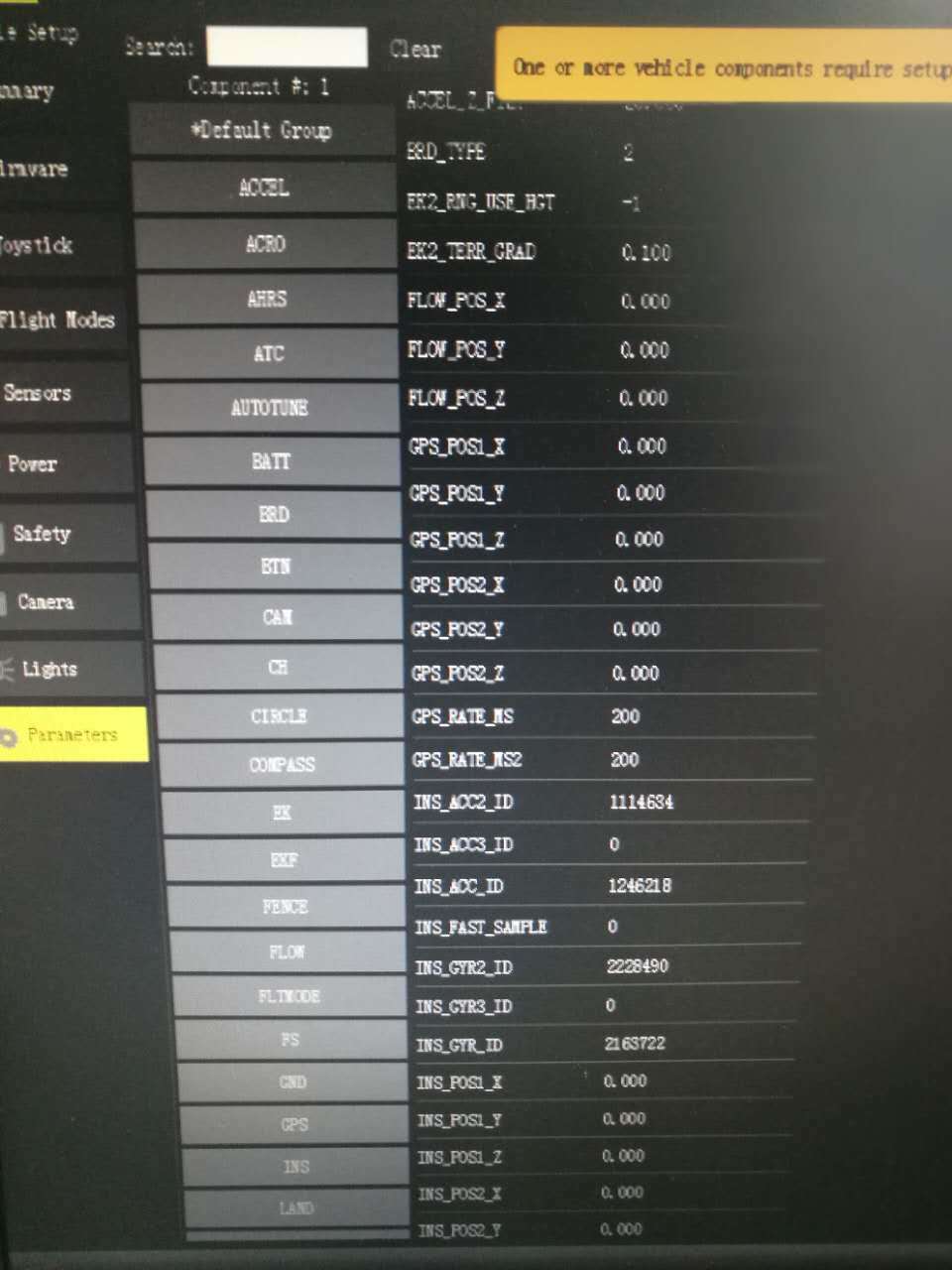
I have almost finished the BlueROV2 assembly work and a strange phenomenon was found in the test. The camera servo is synchronized with the action of the lumen light. That means if I press the button to increase the brightness of light, the camera servo will rotate at the same time. If I decrease the brightness, the camera servo will rotate versely. If I remove the sigle yellow line of lumen light from the Pixhawk, the servo will never rotate again. I have checked the wires of lumen light and camera servo and they are correct. The OS is WINDOWS 7 and the control pad is XBOX game pad. The following pictures are screenshots about wires, joystick, camera and parameters. What should I do? Thank you for your attention.
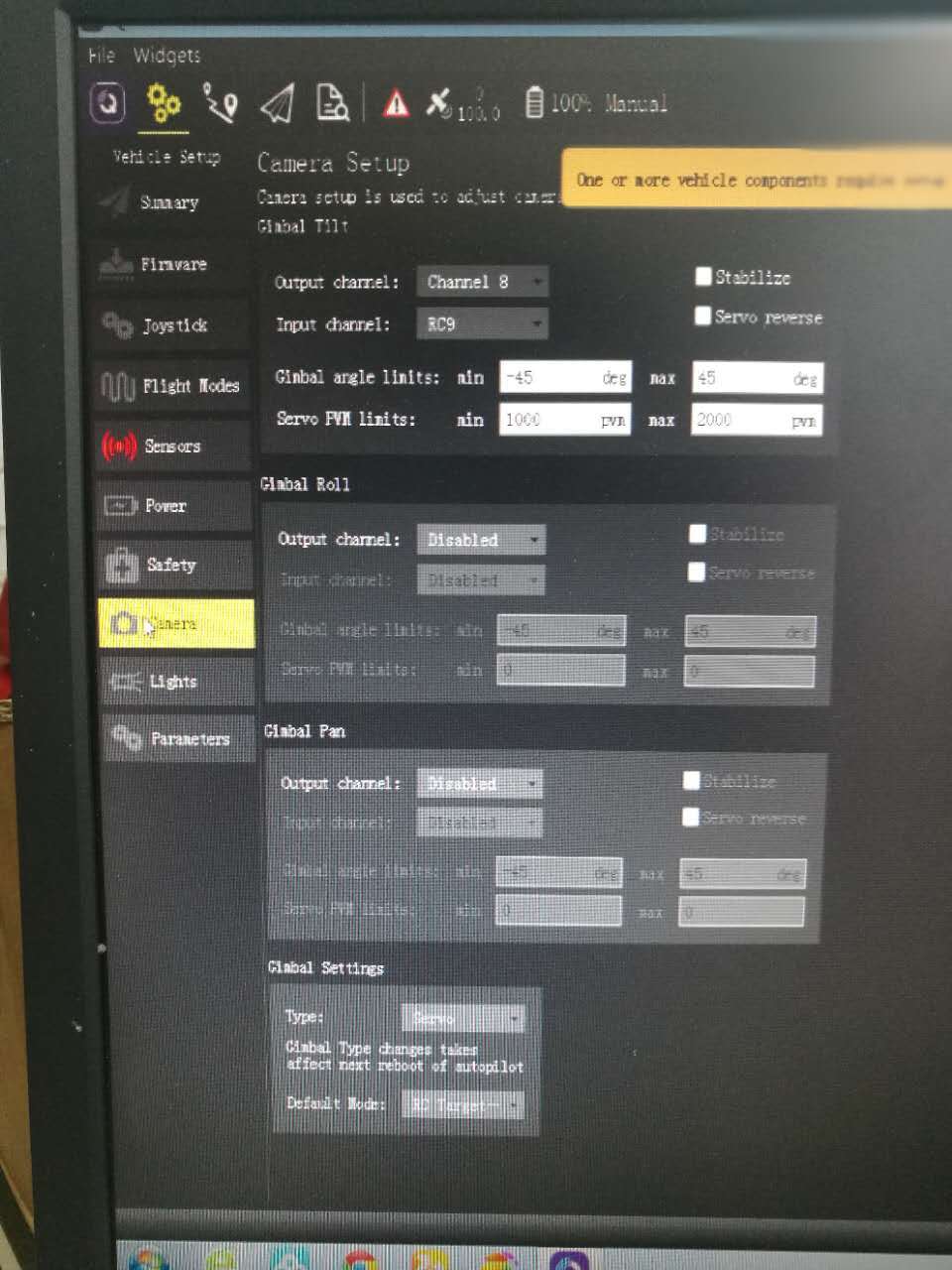


Please set the ‘Input Channel’ on the Gimbal Tilt to RC8.
-Jacob
Thank you very much, It works.
By the way, do you know where can I find some manuals and documentations about ardusub setup and firmware flash setup?
Min
Hi Min,
You can find manuals and documentation on ArduSub here:
BlueROV2 Software Setup (for BlueROV2 specifically)
-Rusty
Hi Rusty,
Thank you for your help.![]()
-Min