Hi, I am with Arizona State Underwater robotics working on designing a AUV for AUVSI and the ping 360 looks really appealing for this task. We currently are using a nivida jetson as our main computer and dont have any spare USB ports and RS485 isn’t something we want to do if possible. We saw that Ethernet support is possible but not yet implemented, we were wondering if there is a possible timeline of when this would happen and if not would it be possible to do it on our own.
We aren’t working on an Ethernet cable anymore because we couldn’t find a supplier that was willing to make a JST-GH to RJ45 cable for us.
You can certainly try to make one on on your own, the Ethernet configuration wire colors can be found on the Technical Details tab.
Will that require a change to the firmware on the ping 360
@colt117, The ping360 will run on ethernet with pingviewer today if you plug it into a router on the network, we just don’t support it on our own rov platforms right now (but that will come soon).
We are preparing the documentation on ip configuration etc. The default configuration is DHCP client.
Sweet thanks for your help were planing to have a pi inside the bot act as a router so that solves that problem
Are there any updates on this, don’t have enough USB ports so would like to run the pin 360 over ethernet as I now have installed the blue robotics ethernet switch.
We’re yet to fully document the conversion process, which was originally because there were some issues with connecting via an ethernet switch instead of a router, but it’s possible(/I believe) those have now been fixed. I’ve got a meeting with the relevant people tomorrow so can come back to confirm. For what it’s worth, it works fine for me.
If you’d like to try it you can change the Ping360 to the ethernet configuration port (shown in our changing the interface guide), and then create an extension cable with the 4-pin JST-GH to JST-GH adaptor PCB that came with the Ping360 plus one of the JST-GH to JST-GH twisted pair cables that came with the Ethernet Switch, which you can then plug into the Ethernet Switch.
As warned about in the conversion guide:
You’ll need to make sure you’re running the latest version of Ping Viewer, or it may not detect the device.

I can’t seem to completely connect (connected directly to the computer over ethernet) get a blue dot and the setting I choose don’t seem to make any difference.
can’t seem to connect at all through the Blue ROV over ethernet only work over USB through the raspberry pi. USB to computer won’t connect properly either.
Does it work if you set it to a static IP on the same subnet (e.g. 192.168.2.4)?
If not, what message comes up if you hover your mouse over the blue dot?
I’m hoping/assuming you only tried to do the USB connections when the Ping360 PCB was connected in the USB configuration? When it’s in USB mode it should work fine to connect either directly to the computer running Ping Viewer, or connect via the Companion Raspberry Pi.


Normally when connecting to our Companion computer it has a default IP of 192.168.2.2, so we set the topside computer IP to 192.168.2.1 (subnet mask 255.255.255.0), in which case the Ping360 can be set up as something like 192.168.2.4.
No, the guide is unfortunately still not available, because some other projects have higher priority.
Hi Eliot
how do I set the Ping 360 IP address?
If I connect with the network settings you suggested above the Ping 360 does not connect through Ping viewer.
If I connect to it by obtaining an IP address automatically it shows up in Ping viewer but I am unable to connect to it or change the IP adress. I’m a little stuck
I figured it out, you need to connect the Ping 360 through a router to be able to change it to a static IP address. The Blue ROV network switch will not allow you to connect to the Ping 360 until it is set to a static IP. Directly connecting your PC to the Ping 360 does not seem to work either
Glad you’ve seemingly managed to solve your issue ![]()
This is a bit confusing to me, because I’m aware it was an issue previously but it’s not something I had problems with, and I believe Ping Viewer v2.3.0 was supposed to fix that (but from your screenshot that’s the version you were using).
When I initially connected the Ping360 to my computer I was able to click the cog (beside the blue “configuration is required” signal) and set a static IP, after which it worked as expected. Was that something you tried, or were you trying to set the IP somewhere else?
Yes that exactly what I tried
Alright, thanks for confirming.
That’s supposed to work, so I’ve passed this on to our software team. If possible it would be great if you could fill out a bug report with the details of your setup ![]()
Hello,
I’m having the same issues, straight to a PC, cannot bench tested without a router in the middle.
Exactly same windows and the post, and if I try to configure Static IP (and after set the PC) or DCHP it belongs like this

Ping viewer version is 36168C2.
Any idea?
The project we are doing is straight using only the sonar via Ethernet via a Fathom X PCBs, as only need the sonar and nothing else. That is the reason we are trying to get it first on the bench.
Best regards
Ramon
Hi @Ramon, welcome to the forum ![]()
I spoke about this with the software team earlier, and they wanted to know is your topside computer on the same subnet as the static IP you’re assigning to the Ping360? If not it won’t be able to find it.
Also make sure you don’t have a firewall that’s blocking UDP communication between your computer and the device.
If those aren’t the issue, then
Alternatively, please provide a GUI Log of what happens when you open Ping Viewer and are faced with just this display, and any other information you think might be relevant (e.g. IP assignment, network setup, etc).
Hello Elliot.
Thanks for the reply.
Please find attached some pictures showing the configuration. I can see it when pinging it, but not sure why the Pingviewer doesn´t allow me to access to the sonar, showing blue dot. The Sonar takes the fixed IP as you can see but not sure why cannot access.
- With the firewall Off
- CMD showing comms
- Network card IP settings with subnet 255.255.0.0 and tried also 255.255.255.0
Let me know your thoughts.
Best regards
ROVSEA MARINE SERVICES
C/EMILIO GONZALEZ LOPEZ 27
CP:15011 A CORUÑA



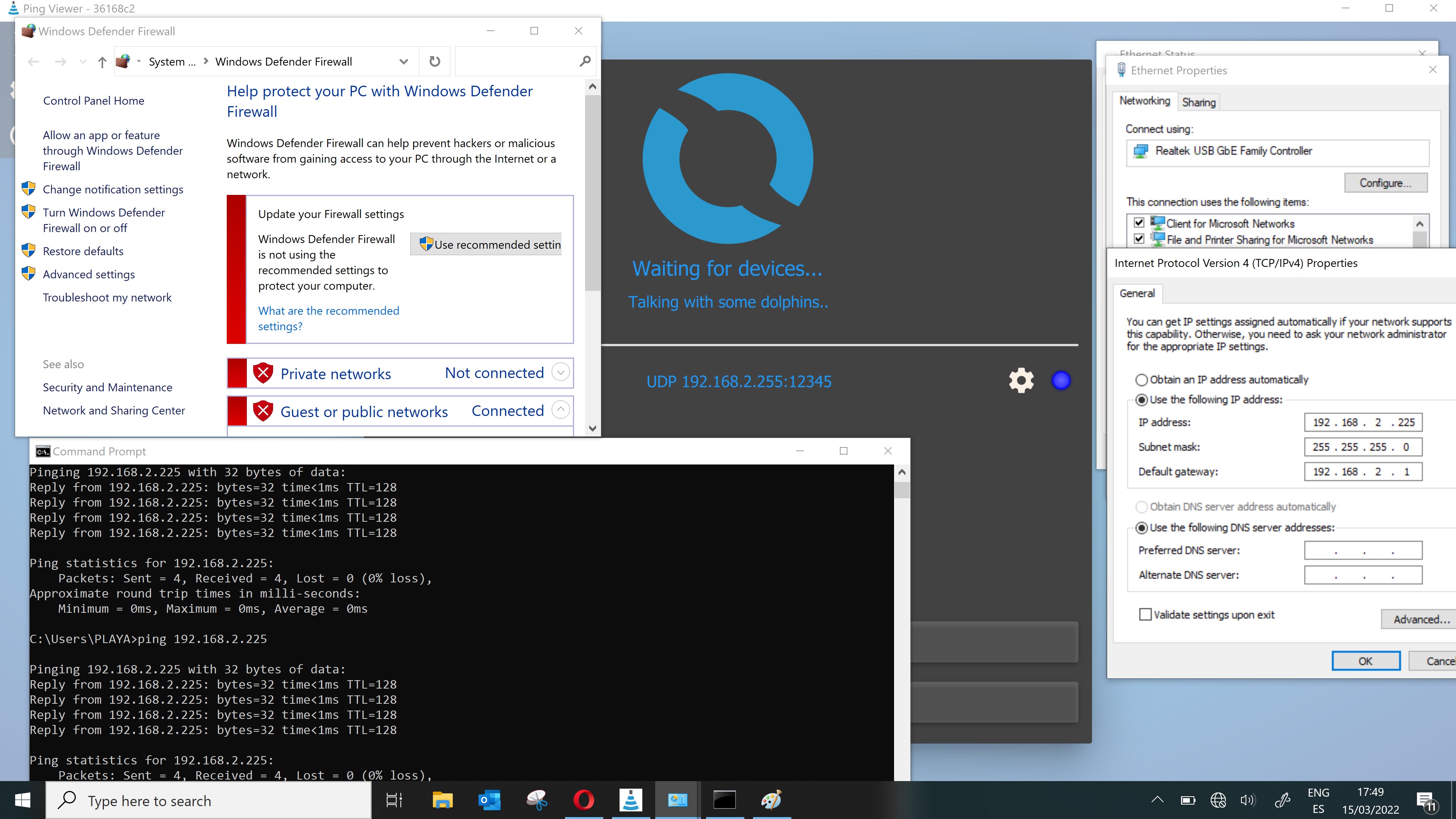
Can you try setting 192.168.2.1 for your computer - the subnet mask should be 255.255.255.0, and the default gateway can be left blank (from our Software Setup Guide):

And then try setting the Ping360 static IP to 192.168.2.4?
If I remember correctly, xxx.yyy.zzz.255 is a broadcast address, so setting that could be causing issues.