This Cornavirus lockdown has allowed me to catch up on some projects I’ve been wanting to get off the ground.
I am getting real close to completing my UI that will mostly replace QGC. The idea (for now) is QGC will be used for initial setup and then only my UI will be used.

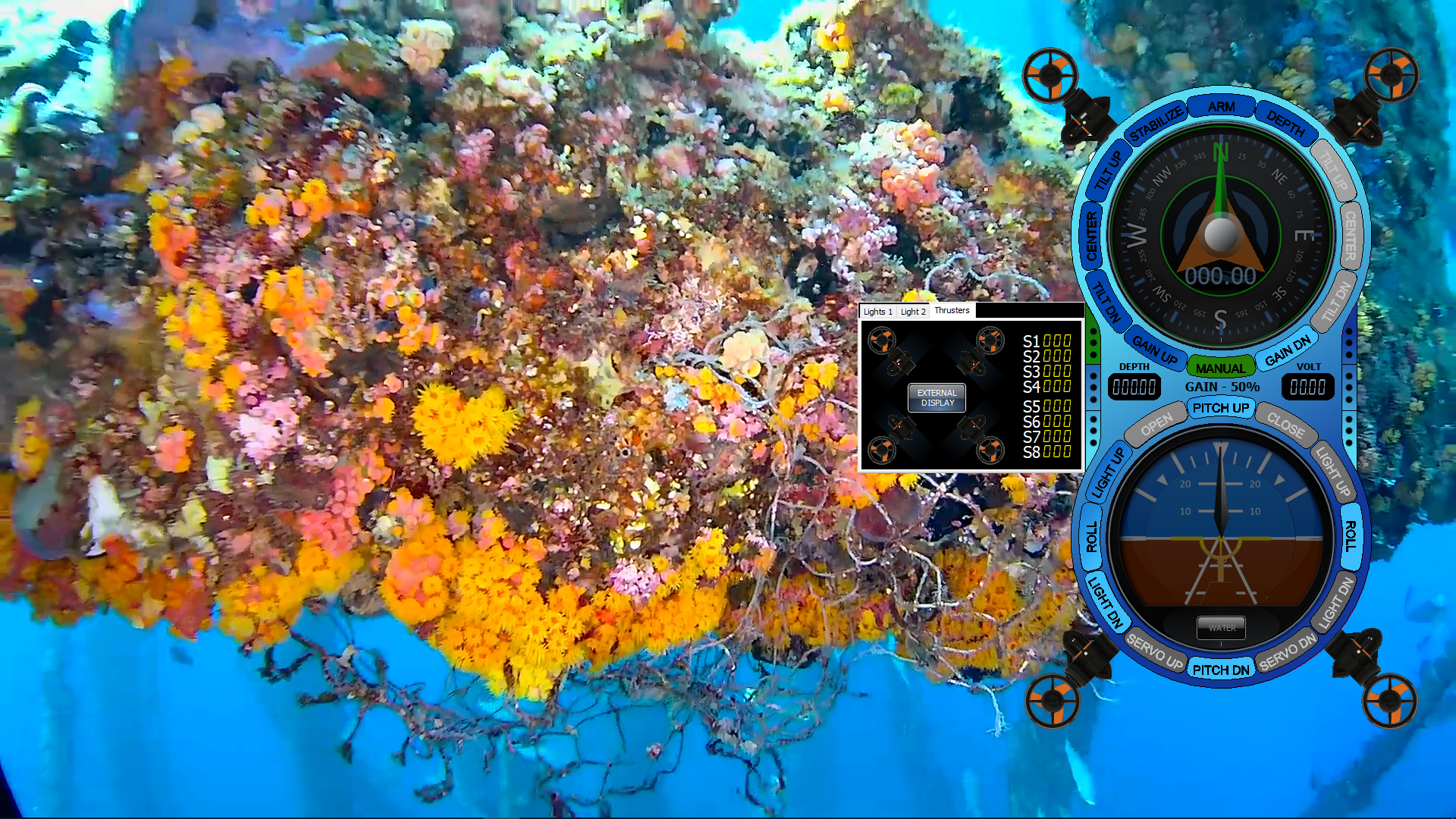
The UI can be moved around and alpha blend with the background.

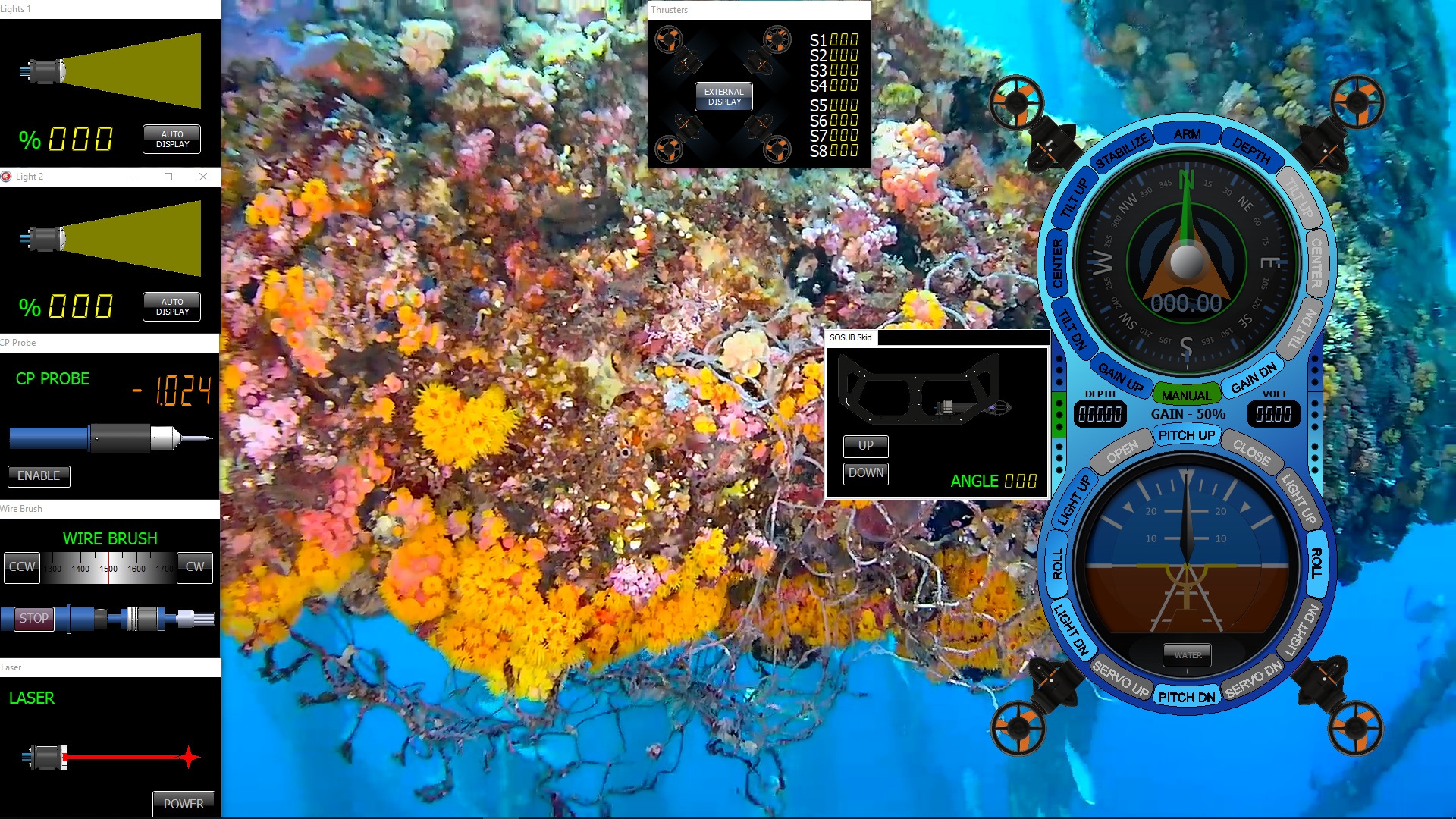
On the left side, it has 3x expandable tabs that each have dockable widgets.
On the right side you will find the setting tabs. Depending on the tab, it can be set to auto-hide. For example, each time you turn the light up or down, it just shows you the level for one second.

The thruster feedback can also be set outside the widet. (Don’t worry, it won’t fly out of the screen, although tempting)
You can drag and drop these anywhere on the desktop and the application will remember where everything was next time you load. They also have individual alphablend capabilities.
My application also comes with a container that can load any 3rd party software. Such as Ping360. It is loaded with the sonar button on the side.

You can also dock the third party application in the main widget. This can be particularly interesting for positioning, rear facing camera, etc.

My intention is to sell this software 500USD for the basic system that can control a basic BR2. Includes 1 year support and free updates. I’ll have a discount for beta testing.
For video display / recording, you can use whatever you want. I wanted to leave this flexibility to the end user and keep pricing down. That said, I do sell Oceanvault - Recorder and will be coming out with a cheaper more basic version later this year.
Additional widgets will cost extra, contact your supplier for pricing.
For example, this widget is made for SOSUB’s manip skid and exclusively available through them. Get in touch with @SoSub for more details.


I also have my own widgets which are free of charge when purchasing equipment from me such as:



Any other widgets development would come at extra cost sold as a plug-in
Let me know your thoughts and suggestions.
Cheers,
E.