Recently, we presented on the work done over the course of the summer on our custom-built submersible. We wished to present our motor functionality during the presentation, but we were unable to.
We initially got all of the hardware and software set up. During this time, the specs to the submersible was 5.25V at around .7A, consuming approximately 2.5-3W of power. After testing button functions for about 1 second, the vehicle disconnected from Cockpit.
We were able to plug everything in again, but the Navigator was now consuming about 4-5W of power. After waiting for 10 minutes, the status light on the Navigator would not turn on, and therefore the vehicle software could not be accessed.
That’s a strange issue! Can you share what your test of button functions consists of?
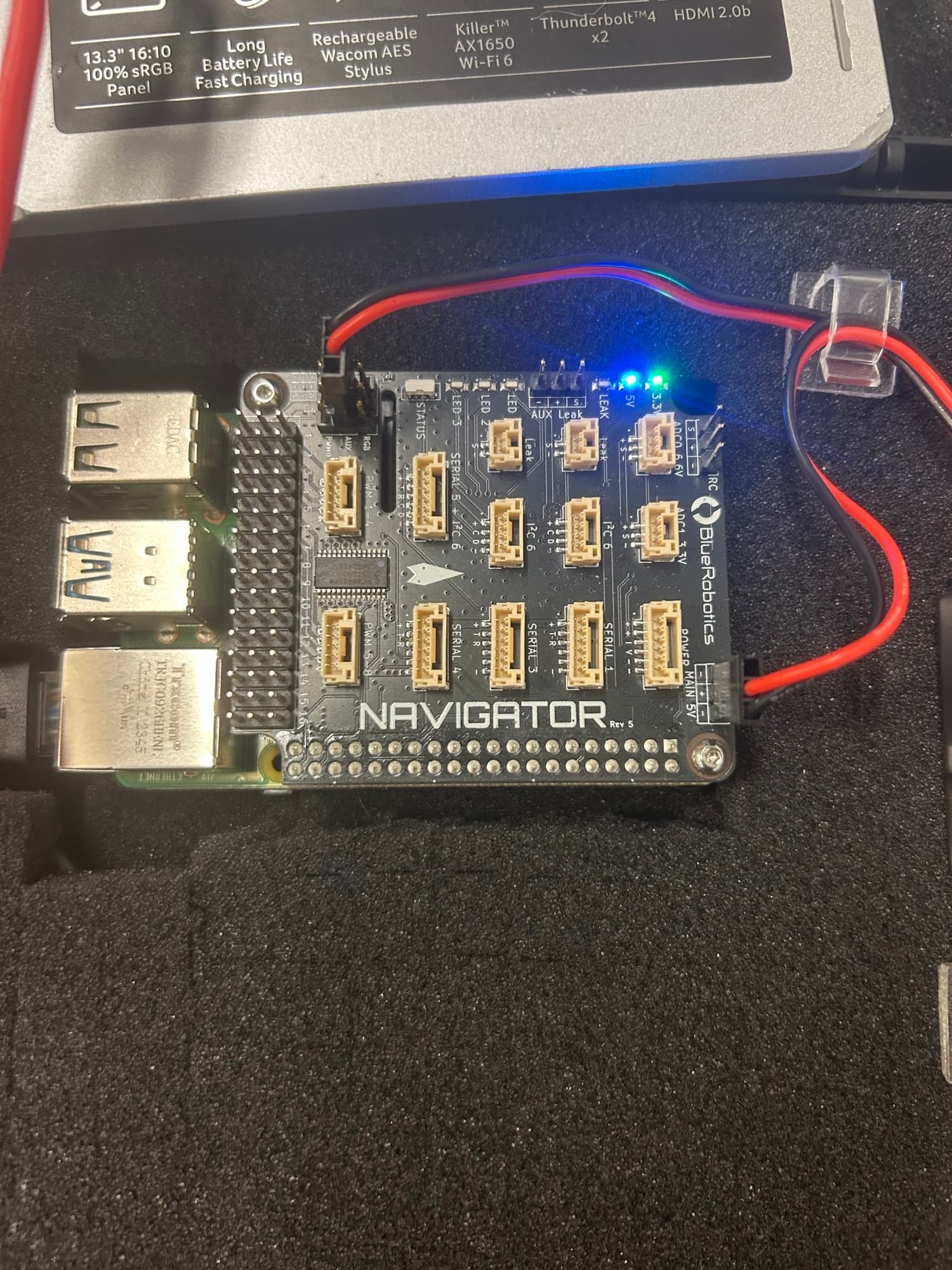
The navigator should never get hot, it doesn’t have any high current capacity control… can you share more about how you’re connecting things to it? I see you are powering it at the 5V connections, are those leads both going to the standard UBEC?
How are you connecting your motors? Are they brushless motors using an ESC? Is the ground of these motors power supply common with the ground of the Pi / Navigator power supply?
Note that the Raspberry Pi should not be powered with more than 5V… the Navigator protects against over voltage, you may be running into that?
The button tests consists of using the D-Pad on the Xbox controller to change the output of servos 9 and 10 between 1100 and 1900. These servos are connected to two Basic ESCs that change two brushless motors connected to the submersible.
The main 5V and AUX 5V are both connected to the standard UBEC that you have linked.
The grounds for the wires (the motors and UBEC) are all connected to the same power supply, so I assume their grounds are the same. Perhaps they need to be connected to same black banana port?
I can also try reducing the supply voltage to just 5V.
I think your issue is likely the 5V supply - it needs at least 7V to produce 5V output (typically 4S battery voltage) you may simply not be powering the system correctly…
I am using the same navigator board system and I have a similar issue. I am using an 8 V Dc power supply for the board and have it connected to the main and auxiliary power ports. The only issue is I cannot seem to get it connected to my ground control and other blue ros control softwares on my computer. I get the status and power lights but cannot seem to get connection.
We also tried it at 5.25 V before and had the exact same issue. We are using and ethernet connection for the raspberry pi and have tried the USBC connection as well but neither have worked. Neither will connect to ground gontrol or pilot softwares.
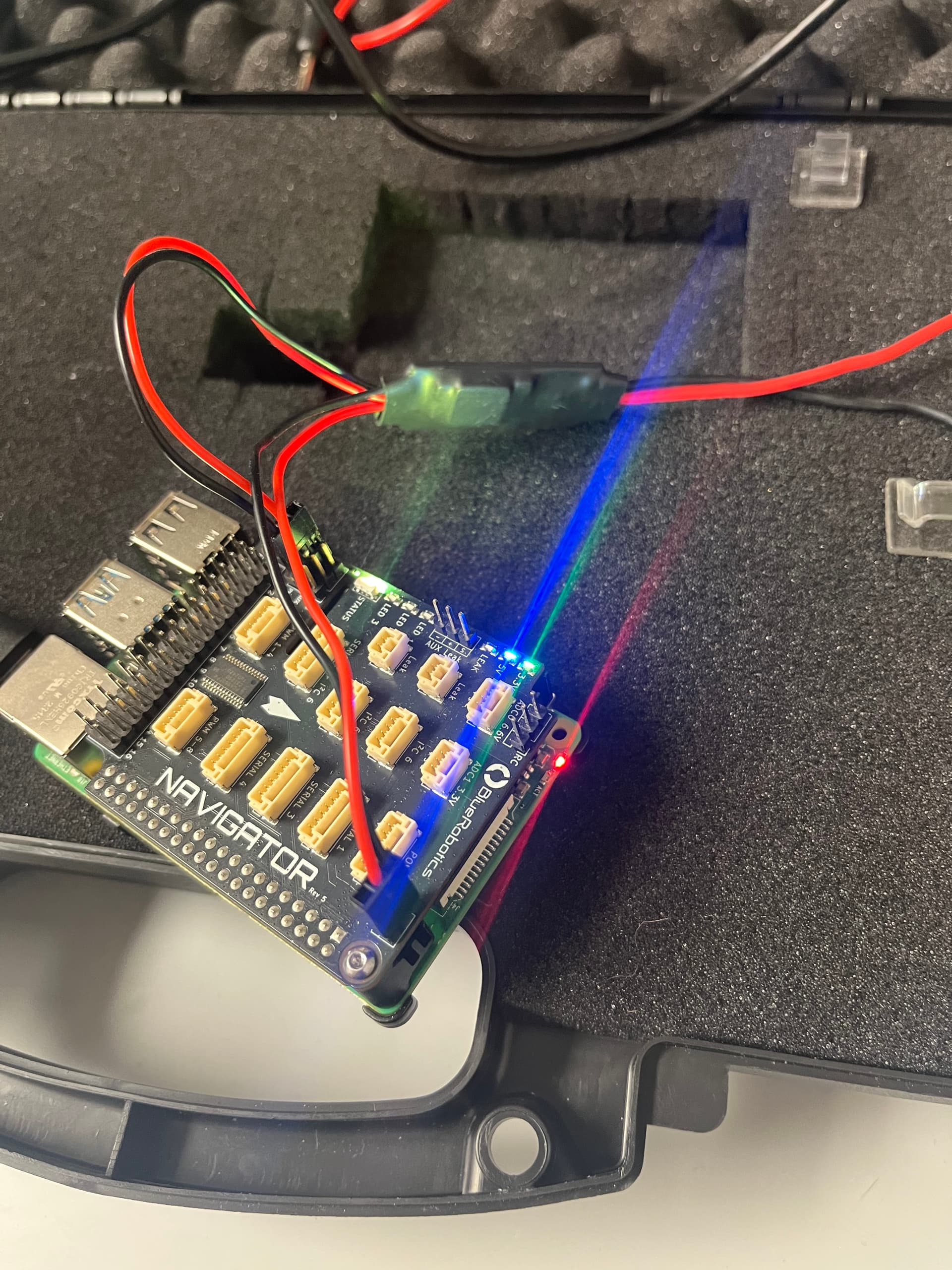
For the pi specifically, the red light indicating power turns on but the green one has not turned on at all. I also flashed the SD card in the Pi once but I can do it again. I observed the output of the HDMI cable on the terminal on my personal Dell and I was able to get a response after pinging the HDMI. Does this clear up more of the problem? You can kind of see it in the picture, that red light on the bottom on the Pi board is the only LED I can get to turn in Pi wise
An HDMI cable is not a valid interface to “ping” with, and so I’m not sure how you managed to connect a video output of your Pi to the video output of your laptop!?
If the green light never comes on, either the SD card was not flashed properly or the Pi has been damaged…