Which parameter holds the user inputs(ie., throttle, pitch, …) for the rover in the data-flash?
The inputs are in the RCIN message, individual channels are accessed as RCIN.C1, RCIN.C2… etc.
Isn’t RCIN for PWM signals from a RC Receiver? I want to know what input I gave with my gamepad to the rover during the dive.
I can get the roll, pitch and yaw from ATT but I am not sure about throttle. CTNU (throttle and altitude information) has a throttle attribute but my dataflash is not recording it. The lable for CTNU is there in my dataflash but the actual data is not recorded during flight. Is there a way to enable this? I know mission planner allows us to choose which things to record but these options are not available when I plugin my pixhawk with ardusub flashed on it. Same goes with QGroundControl there is a parameter to enable recording dataflash but none to pick what gets recorded.
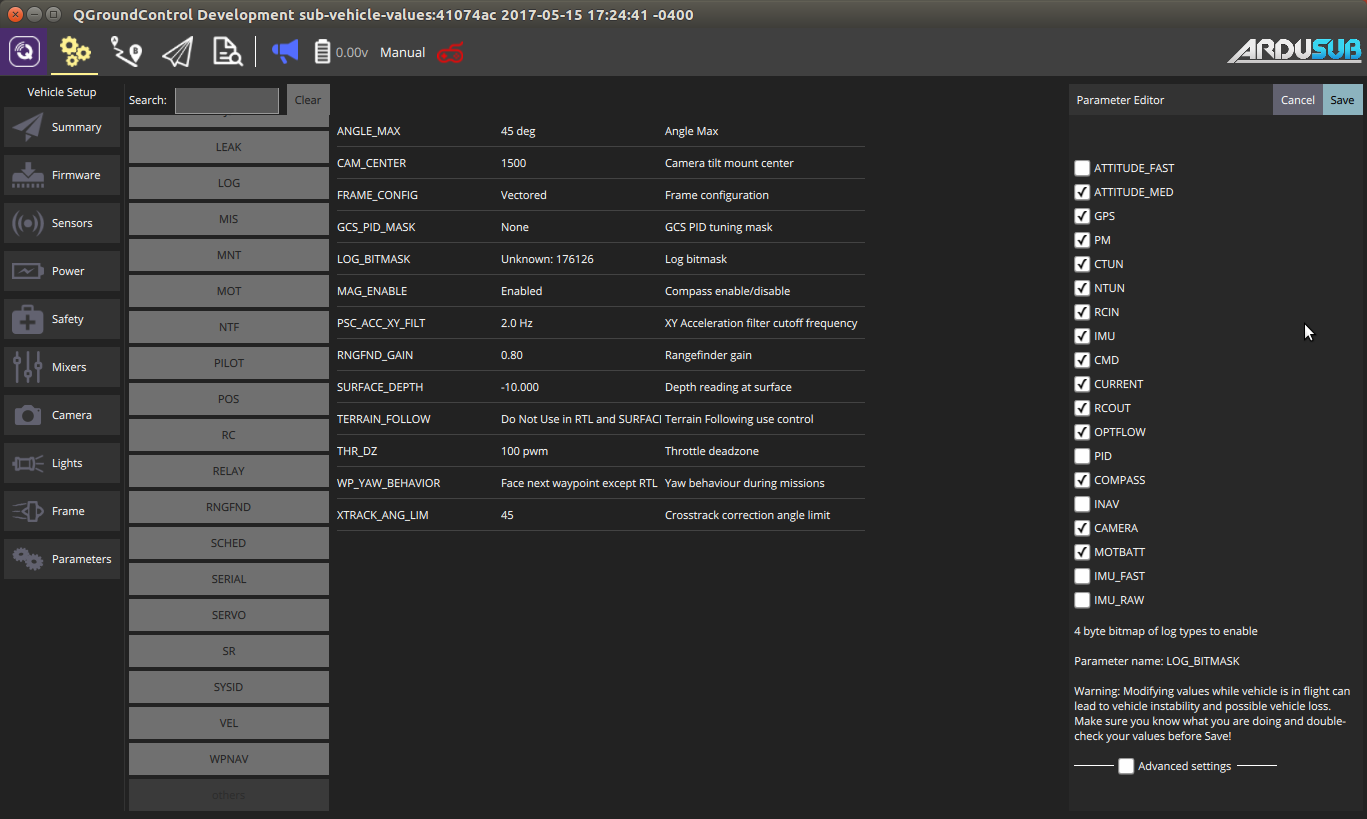
The parameter you are looking for is LOG_BITMASK, it doesn’t appear in the same category as the rest of the logging parameters.
RCIN will also write the input from the joystick, no RC receiver required.
-Jacob
can you please explain which RCIN channels correspond to which control surfaces.
This is the mapping for ArduSub 3.5:
1: Pitch
2: Roll
3: Throttle
4: Yaw
5: Forward
6: Lateral
This is the mapping for ArduSub 3.4:
1: Pitch
2: Roll
3: Throttle
4: Yaw
5: ‘Mode Switch’
6: Forward
7: Lateral
Awesome. One last question what is the range of each of these values?
In general, 1100 to 1900.