I’ve recently installed Cockpit and am aiming to use it more consistently. However, I’m running into a problem: every time I arm the vehicle, the thrusters immediately ramp up to full thrust. Some posts suggest this could be due to incorrect X-axis settings, but I’ve already verified that my X-axis values are correct.
Is there a guide that outlines the expected input values for each axis? I’ve tried configuring my controls to match the setup I use in QGroundControl—RC Mode 1—with the left joystick handling throttle and lateral movement, and the right joystick controlling forward motion and yaw. It’s possible this mapping is contributing to the issue.
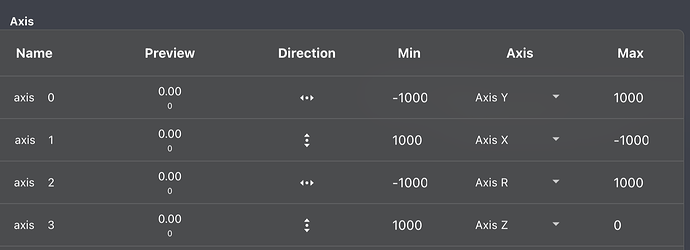
The picture above details the default (mode 3) values for each axis - it is the vertical one that is different (Z) and so a bit confusing!
This screenshot was taken on the table view of the axis - you can also set the axis range in the visual view by clicking on a joystick in the picture of the gamepad.
Please share a screenshot of your table view of axis configuration if you still have issues after making adjustments!
I’m assuming the thrusters that ramp up are the vertical ones, and that the vehicle isn’t in stabilize mode when you arm it (if in any mode but auto, out of the water, motors going nuts is expected regardless of GCS used….)