Hi,
I’m also having the same issue here. What I have experienced is the following:
- At the beggining of an inmersion I see depth information in the QGC/Cockpit overlay
- After some time, this information stops appearing and “depth sensor error” messages pop up
- Disconnecting and reconnecting the battery doesn’t solve the issue. I only start seeing depth data again after a few days.
when recieving depth information, it’s not detected on the “Sensors” section in QGC (see image). MS5837 is selected under parameter BARO_PROBE_EXT, as it should.

At the same time, it seems like if it was detected in BlueOS (see image). Why this different behaviour?

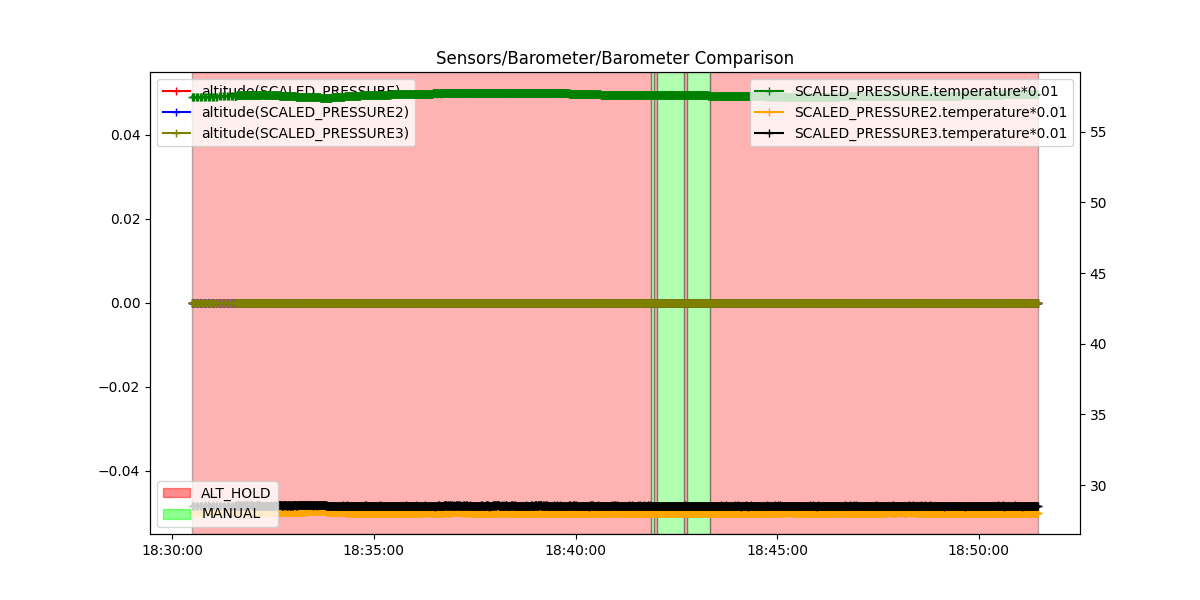
Even when I see depth sensor data in the overlay, it’s not recorded in the telemetry files (see image).
- As suggested in the forum, I checked the wiring and I believe everything is looking as it should
- The sensor has been dried for more than 2h per day as the documentation specifies
- The Bar30 is connected through an I2C Bus Splitter. I’ve tried connecting it directly to the pixhawk
- I’ve seen the same behaviour after trying with another bar30 (from another ROV)
My main question is: why am I able to see depth data and use “Depth Hold” mode, but not receive altitude (SCALED_PRESSURE2) information? We need both the depth information and this flying mode for our surveys.
Thanks in advance,
Eric.
BlueROV2 R3 (Pixhawk1, RPi3b)
BlueOS v1.4.0
QGC v4.2.4
Ardusub v4.5.3