When i learn the ArduPilot developers guide,I found many behaviors where the description did not match the code.
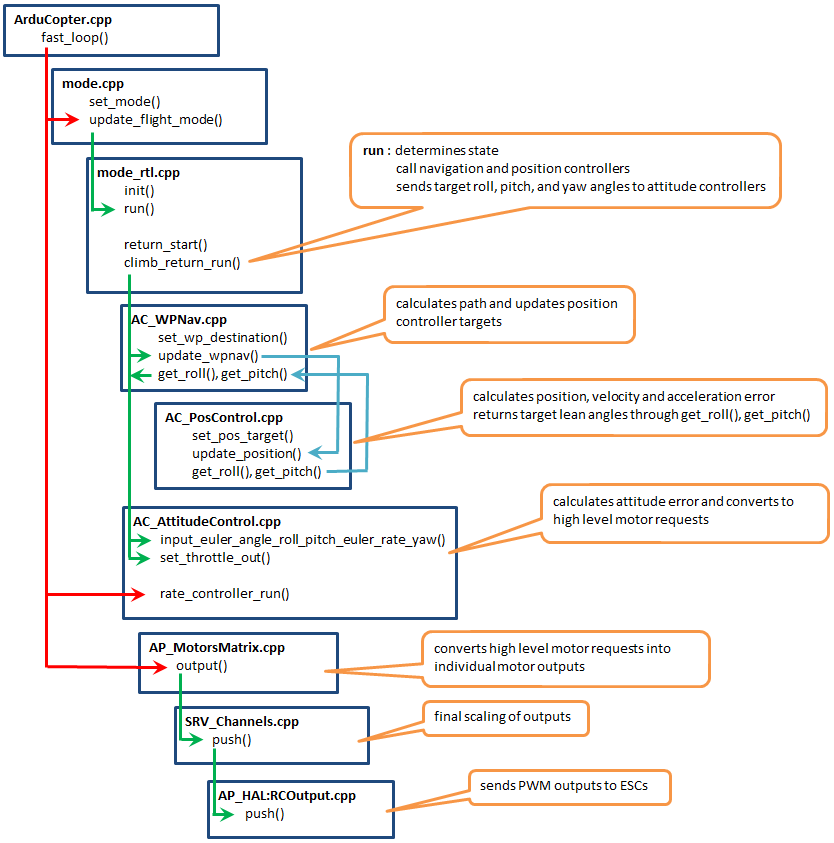
For example, in the AC_WPNav.cpp file, update_wpnav() should call the update_postion() function in the AC_PosControl.cpp file. The AC_PosControl.cpp calculates position, velocity and acceleration error returns targetlean angles through get_roll(), get_pitch(). But in fact, there is no corresponding function in the AC_PosControl.cppfile
In the update_wpnav() function, I don’t see how it calls the update_postion() function. The following figure shows the update_wpnav() function.
So I would like to ask if this situation is caused by a version mismatch between the ArduPilot developers guide and the latest code?
It’s very possible for the documentation to be out of date compared to the latest code on the master branch. If you find something outdated or missing from the docs you can raise an issue.
You will likely also be able to get more detailed information and feedback about the general ArduPilot codebase by asking in the ArduPilot developer chat or the general ArduPilot forum.
I expect the latest ‘equivalent’ functionality here would be that update_wpnavupdates the xy position controller, which uses the current position. That said, I’m not particularly familiar with that part of the ArduPilot codebase, so I may be misunderstanding or missing something.
{kind=link}