I am building a Raspberry Pi-powered underwater camera for scientific research. The camera is a Raspberry Pi HQ Camera with a 6mm 3MP Wide Angle Lens, and the housing is the Blue Robotics 4” diameter watertight enclosure with the dome port. I have struggled to get the camera to focus well in the dome port when underwater. Below is a comparison between video quality 1m away from the camera in air versus in water. Any suggestions on how to get the camera to focus better underwater in the dome port?

Hi @m_ocean !
You’re going to need to adjust the focus manually - this is a bit tricky, and may take a lot of guess / check - in air the focus will be blurry, but in water it will be clear… Creating a small mark on the rotating and stationary point before you begin can be a great reference!
For the Blue Robotics low-light camera, if things are a bit blurry underwater the lens is rotated about 1/2 to 3/4 of a turn counter clockwise to correct. You’re shooting to get the focus on objects very very close to the dome - see this calculator.
UPDATE 8/4/25:
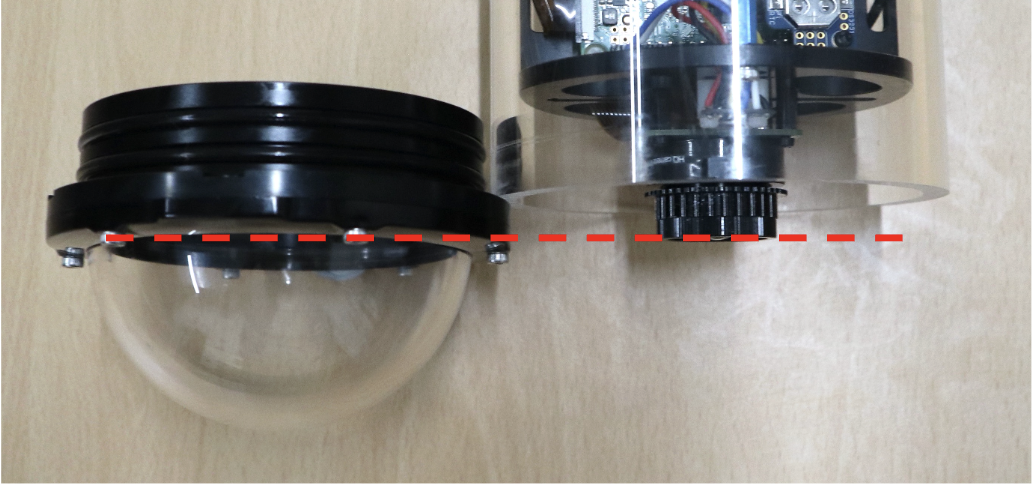
I ultimately was able to calibrate the focus with time-consuming trial and error: adjusting the manual focus, testing video underwater, and then retrieving and assessing quality of the video. The biggest learning was the importance of aligning the end of the camera lens with the base of the dome hemisphere. The image below, from Dunkley et al. (2023), shows this alignment. Other helpful resources are listed below.
Understanding Flat Port and Dome Port Theory