I had a wet test today. The vehicle moved as I expected apart from the left stick, if you move it left then the sub moves right and the when the stick is pushed right the sub moves left. I would like to reverse that but if I do that with the motors it could have effects of other axis movement.
Is there an easy way to reverse this with the Xbox controller please.
Is there any way to zero the depth at the surface please?
Typical UK, rubbish vis, and I had to stop as the tidal stream was picking up.
This sounds like either incorrect joystick calibration or motor direction issues. Did you try the ROV in stabilize or depth hold mode at all? If the motors are reverse from how the ROV expects than stabilize mode will go crazy.
Please verify that the joystick calibration process was correct as well.
You can check the motors for proper directions at home by running them briefly and make sure the joysticks correspond to the right movements.
Hi Julian, there are a number of possibilities that could be causing the reversal issue.
1: The joystick calibration was reversed
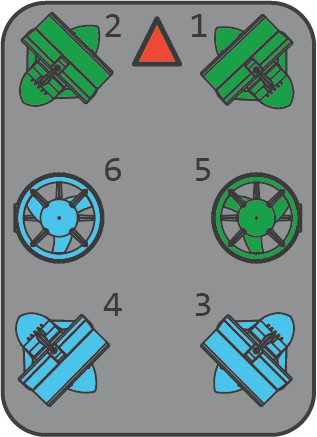
2: The motors are plugged into the wrong outputs (see here)
3: The motor directions are configured incorrectly
Here’s how to test each, I would test in this order, too.
In QGC, Open Widgets->Mavlink Inspector and expand the field that says RC_CHANNELS_RAW. When you move the strafe/lateral stick to the right, then the channel 7 value should INCREASE. If it doesn’t recalibrate the joystick and move the stick in the correct direction.
Trace the wires to the motor output pin on the Pixhawk autopilot. They should be set up according to this diagram. An alternative approach is to operate in Manual mode, unplug all of the motors from the autopilot, then plug them in one by one, making sure that the correct motor spins as you plug it in to the outputs.
To zero depth, search for the BASE_RESET parameter and set it to ‘Reset’, then power-cycle the ROV. In the next QGC release, you will be able to click a button in the sensor calibration page to reset the depth.
Before submersion I tested the thrusters with a light piece of cord to see it flutter behind the thruster when the stick was pushed forward etc. I also carried out a joystick cal.
The water depth was about a meter so I did not get the opportunity to test any other mode apart from manual. Also the ROV was light so I need to add more weight than came with the kit.
I will do what you suggested and get back, thanks.
I just checked, channel 7 value was decreasing. I have recalibrate the joystick and now when I move the stick to the right the channel 7 value increases.
No it is the recommended battery from Hobby King. I attached the extra weight but still found I had to thrust down to stay under. Water temp today was 10.6 degrees C.

{kind=link}