Hello, I calibrated the pressure sensor. It appears in the widgets section, but I can’t see it in the Mavlink inspector. What can I do? I’ve attached my parameter list and photos. Any help would be appreciated.
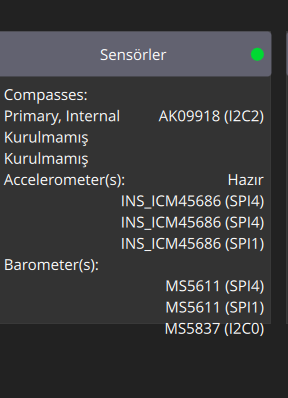
Only the first two sensors are there, ms5837 is not visible
Hi @mmustafasasi -
Welcome to the forums!
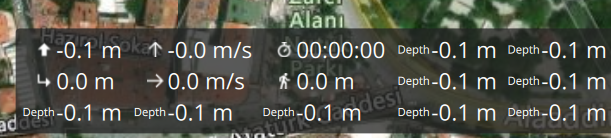
It does indeed look like your Bar30 is recognized ok, and is even reporting depth. You’ve configured the QGround Control instrument panel to show depth - many may times! You can click the pencil icon to edit and remove the duplicates, but the 0.1m shown is likely correct - does this increase as you submerge your ROV deeper?
Yes, the value is increasing, but it is not visible in the mavlink inspector. I will retrieve this data with pymavlink, but since I don’t know which variable it is assigned to, I can’t adjust the depth accordingly in my code
There are 2 barometers in the Pixhawk Orange Cube, only they are visible, the additional sensor installed on the controller is not visible.
My English is written with bad translation, excuse me.
I believe the water depth barometer pressures in this case will show up in SCALED_PRESSURE2, although you should be able to use AHRS2.altitude to get the autopilot’s filtered depth estimate directly.