I understand there is a newer model released that addresses this issue, but I wondering if you could recommend any other precautions that could prevent this in the future, as we are using the older versions?
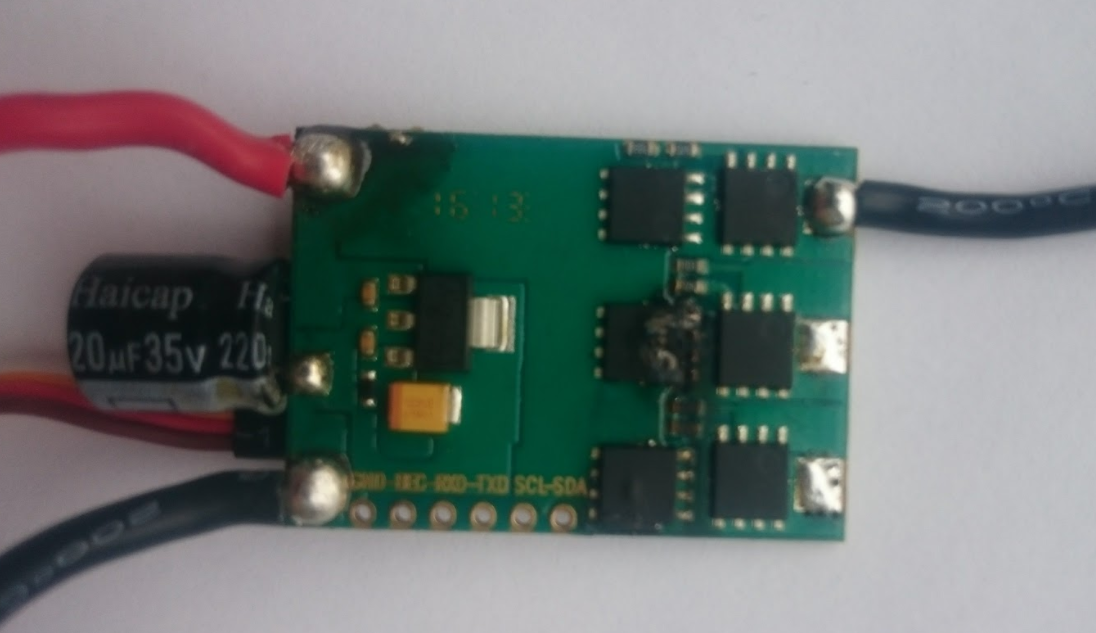
Wow, that’s fairly severe damage. It looks like the motor wires got hot enough to desolder from the board. The newer ESCs have heat sinks but they don’t have any specific failsafes to avoid something like this. However, I don’t think we’ve seen an ESC get damaged like this when a thruster is jammed. Do you know if the thruster was completely jammed or just had increased resistance?
Being completely jammed would cause the ESC to try to run, but at relatively low current, which shouldn’t cause any damage.
Being partially jammed with extra resistance could cause the ESC to run at higher current and could cause damage. I imagine this is what happened.
We only realised the thruster was completely blocked from the previous dive when we tested it before deployment. We removed stuff (plastic) and then we opened the bottom part and noticed that the… “nut” (?) below the rotor was unhooked and into the plastic cover. We put that in place, but it was still not working and then we realised back in the lab that the ESC was damaged.
Alright, thanks for the info. It’s always best to check the thrusters for free rotation before starting a dive and stay clear of seaweed and other possible obstruction. I don’t have any other precautions to recommend, unfortunately.
We’re working on a new camera for the ROV that will include a microphone so that you get some audio feedback from the vehicle. That will be neat because you’ll be able to diagnose problems like a jammed thruster by listening.
If you’ve got any other questions feel free to ask here or reach out at support@bluerobotics.com.