Hi,
We are trying to implement some perception and control algorithms on BlueROV2 via a topside computer.
First, we installed the ROS extension on BlueOS and attempted to use the package “bluerov_ros_playground” to extract some data and perform visualization.
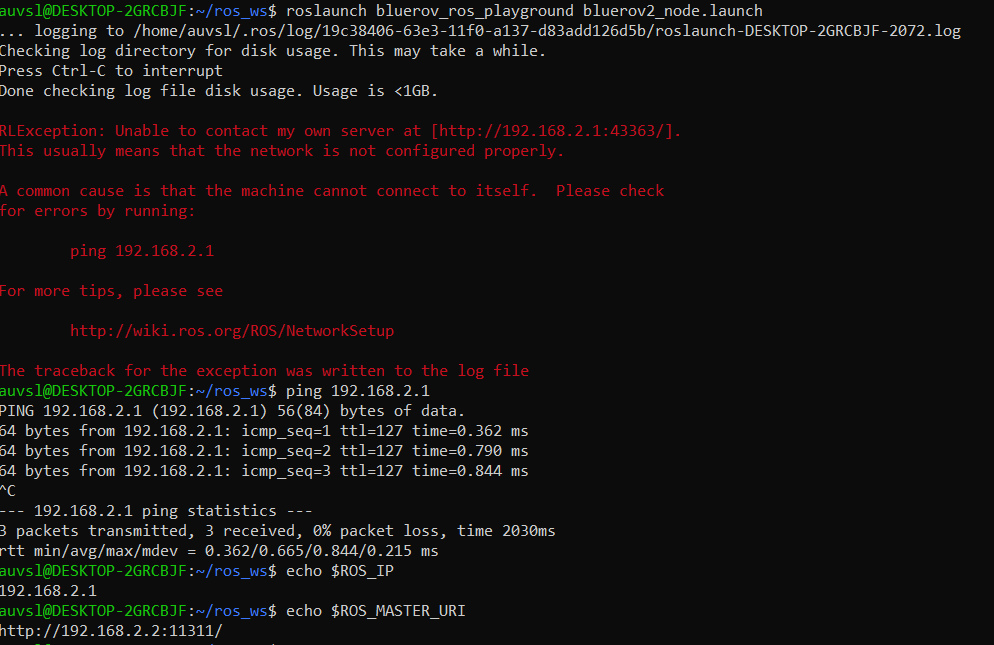
Although the topics from BlueOS in WSL(Ubuntu 20.04 / ROS Neotic) can be seen, none of the launch files in the package appear to work properly. The error message are rather confusing - please see the screenshot below:
I’m wondering the issue is coming from the misunderstanding of network setting or any compatibility that we didn’t notice.
Any suggestion would be greatly appreciated.
Hi
We did set the laptop’s IP to be 192.168.2.1. The Ping Viewer for Ping360 and QGroundControl are both working well.
Our current goal is using ROS to communicate with ROV and extract its data(image/sonar) to test some algorithms on site by the laptop.
We browsed the forum for a while, but not sure how to reach this goal. The strategy might be similar to this issue(SLAM on BlueROV2).
If there is any other similar resolved issues or suggestion about implementing ROS on ROV, all are appreciated.
I pinged 192.168.2.1 in the screenshot because it was suggested by the error message , and there was no errors popping out.