We are developing AUV based on BlueOS (Raspberry Pi 4B with Navigator board).
There is a simple sonar on the AUV that uses UART TTL for communication. We connected the sonar to serial port 1 from Navigator board. Sometimes after start of the vehicle we don’t receive any data from the sonar. We did some experiments and found out that if we restart the sonar (disconnect and reconnect the power line) it works well.
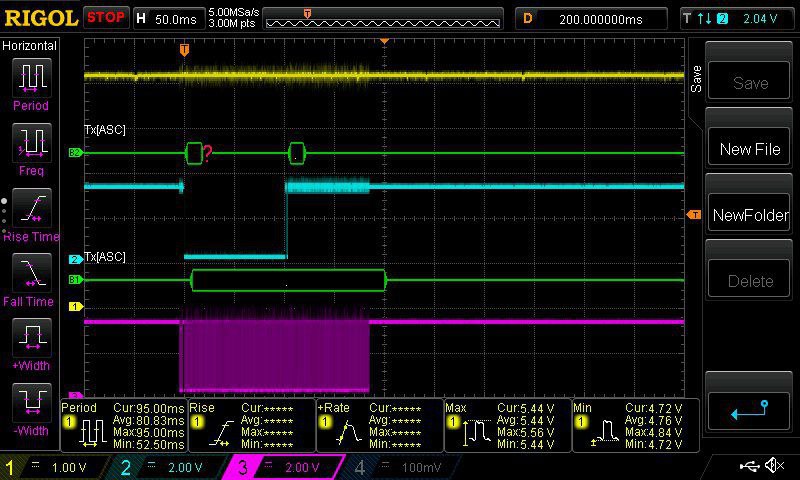
We connected oscilloscope to the TTL line between sonar and serial port 1 and found out that right after BlueOS starts (the vehice does second beep, ~40 seconds after turning on), there is a relatively long low-level signal from RasPi. After receiving this low-level signal sonar ‘freezes’ and doesn’t respond until it is restarted.
I’m attaching image from oscilloscope: blue signal is RasPi, pink is sonar.
We checked that this signal occurs only when BlueOS containers are running. If we manually stop the containers right after RasPi starts, we don’t have this problem.
We also connected sonar to serial port 3 on Navigator board and there is exactly the same situation.
Hello @schashni, which sonar models are there?
Is one of them from the Ping family, such as Ping1D or Ping360?
If not, can you try disabling the ping service?
Inside the terminal tab, press Ctrl+B, then S, then search for the ping tab and press Ctrl+C.
I managed to stop ping service, but the problem is that my sonar ‘dies’ right during the start of BlueOS container. Can I somehow disable ping service permanently? Without rebuilding the container.
Evening update: we figured out how to disable ping service - through adding
“environment”: [
“BLUEOS_DISABLE_SERVICES=ping”
]
to startup.json for bootstrap container.
So, if we disable ping service, there is no problem with sonar, it works well.
Thank you very much for the idea.
Unfortunately, we cannot leave it like this, because we also have Ping1D on the AUV. And we need both working at the same time.
As far as I understand from BlueOS source code, ping service does ‘probing’ for all serial ports it can find. And probing signal freezes our sonar.
Is there any way to disable probing of ping service for particular port? For example, /dev/ttyUSB0.