i find 3d modell of blurav v2 on grabcad and want to build one like that
3d print in petg or abs,or laser cut
i want to ask did i figured out electronic part right ?
1st rpi3 i need to load image fro bluerov site
then pixhawk (ph) load ardusub fw
need 2 x thrust commander (tc) to connect pair of brusheles motors with car rc esc
and fathom-s teter video interface card to connnect cat5
and battery (have 3 brand new 5000-3s-20c lipos) on board
so i connect :
cat5 to Slip Ring
Slip Ring -cat5 to fathom
fathom to ph
2 tc to 4 esc to 4 motors
ph to 2 tc
rpi3 to ph
camera to rpi3
and last battery to esc and 2x tc camera (sj4000)
Apologies, but your design set-up is a little hard to follow. Would you mind drawing it out? The Fathom-S and Thruster Commander(s) are not needed if you have a Pixhawk and a Raspberry Pi.
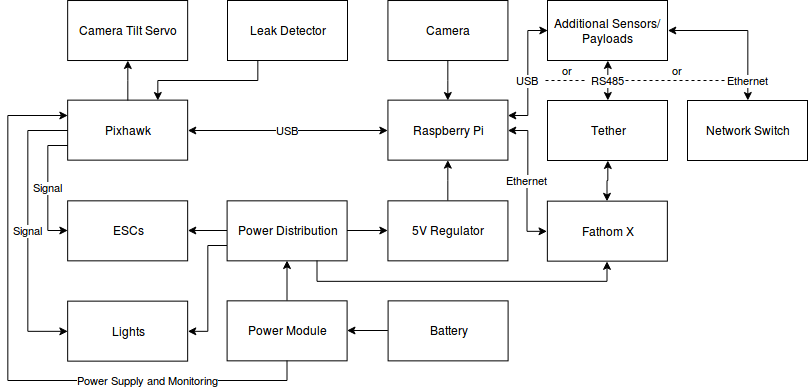
i see that blueprint and ardusub.com /images/hardware-diagram.png
and i figured out that i need fathom-s or x to be tether link over cat5 to pc
even on blueprint it say fathom x on no red wire bec and old red wire bec blueprints
but ok i dont need these , even better
thanks
so beside pixhawk, rpi3b ,sj4000 cam and batterys i have
i need ubec to power rpi3, 6 esc with motors ,cat5 cable,slip ring,couple el strip connectors
,14 and 24 gauge wire to connect all,have pixhawk connectors
hmm what else oh yea u3
can u tell what are u3 on blueprints ?
is this u3 power module
??
and now without fathom board i just connect cat5 directly in to rpi3 ?
and all connect like this ardusub.com/images/hardware-diagram.png
ignore fathom --and to connect cat5 wire directly to lan socket on rpi3 ?
and isolate like that link i post before
is it better now ?
motors
turnigy-aerodrive-dst-700-brushless-outrunner-motor-700kv.html
esc
hobbykingr-tm-brushless-car-esc-30a-w-reverse.html
with
hobbykingr-tm-programming-card-for-car-esc.html
u3 if i’m right
hkpilot-mega-10s-power-module-with-xt60-connectors.html
ubec for rpi3 power
hobbykingtm-hku5-5v-5a-ubec.html
then uart connector on 2,4,6 6 is black on rpi3
can i use this for light ??
powerful-searchlight-with-built-in-pan-tilt-and-remote-light-mode-switching.html
just isolate in printed case with epoxy ??
all links on hobbyking
The Fathom-S and the Fathom-X are two separate products. you mentioned the Fathom-S in your first post and that is incompatible with the Raspberry Pi.
If you are using a Raspberry Pi over distances over 100m, then you will need the Fathom-X. If you are working at distances of less than 100m, you may instead use the Fathom-E with standard tether (Slim tether will not work).
U3 is this power module. We haven’t tried any of the Hobby King components.
big thanks for help
i have 2 of these u3 modules ,one from pixhawk 2 pack
and second i bought cause description on pix pack say sensor module not bec
which is same
ok will order fathom-e onlywant to explore river and 2 small lakes ,wont even need 100m
{kind=link}