Hi there,
I have mounted a motor with brush on our robot with vectored6dof configuration. I am able to spin the motor with potentiometer by sending PWM input to the servo channel.
The problem is, when I try to move the camera by button, the attached motor is spinning at full level.
I think that the problem is not a high level software problem because when I put the PWM function in comment in the pymavlink code script, the problem occurs again.
What can be the problem?
For now: Light is on channel 9, camera is on channel 10 and attached motor is on channel 11.
I put my channel configuration below.
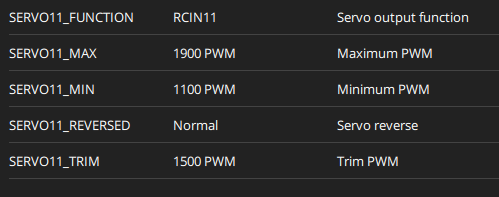
And I have another problem too, when I attach the motor to channel 12,13 or 14 (as the above given screenshot) the attached motor does not work. What can be the problem of higher channels? Do I miss a configuration step?
Note: I’m using pixhawk+rpi4 setup.
Thanks for your answers in advance
And here is further info about my pymavlink scripts on camera (mount tilt) control by button. I will put the code snippets below:
def mount_up_push():
send_button_control_push(MOUNT_UP_BUTTON)
def mount_up_release():
send_button_control_release(MOUNT_UP_BUTTON)
def mount_down_push():
send_button_control_push(MOUNT_DOWN_BUTTON)
def mount_down_release():
send_button_control_release(MOUNT_DOWN_BUTTON)
And here is the function definitions of push and release:
def send_button_control_push(btn):
buttons=1<<btn
print(buttons)
master.mav.manual_control_send(
master.target_system,
# forward*1000, #dpad
# lateral*1000, #dpad
0,
0,
500,
0,
buttons)
def send_button_control_release(btn):
buttons=1<<btn
print(buttons)
master.mav.manual_control_send(
master.target_system,
# forward*1000, #dpad
# lateral*1000, #dpad
0,
0,
500,
0,
0)
Do you think that something on this python scripts can trigger this undesired movement of attached motor?
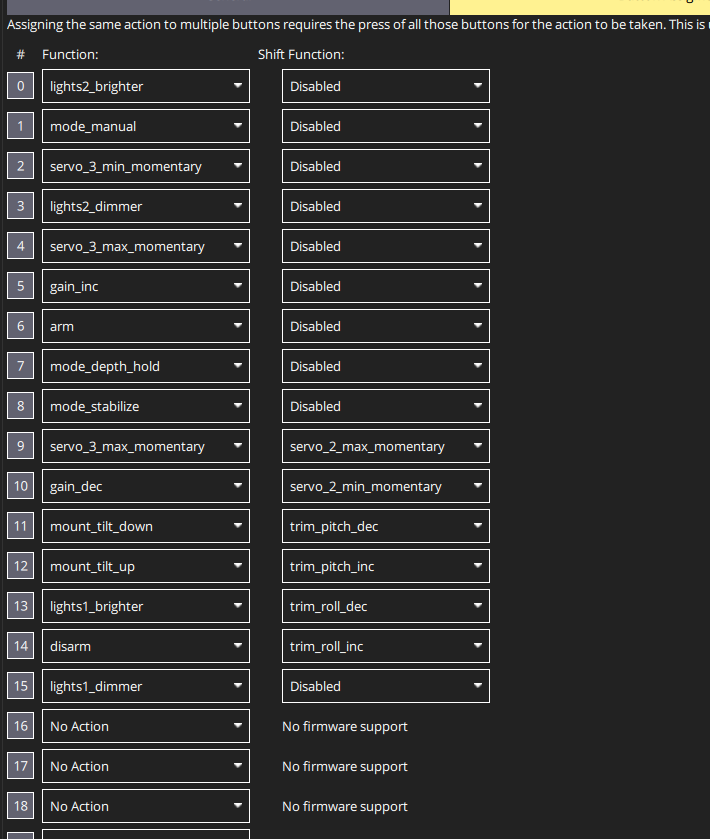
I will put the button configuration of my robot below: