Hi everyone!
My two friends Adam, David and I decided five years ago that building an AUV would be a cool hobby project. The goal was to autonomously, and under water (mostly), circumnavigate a small islet about 600 meters offshore.
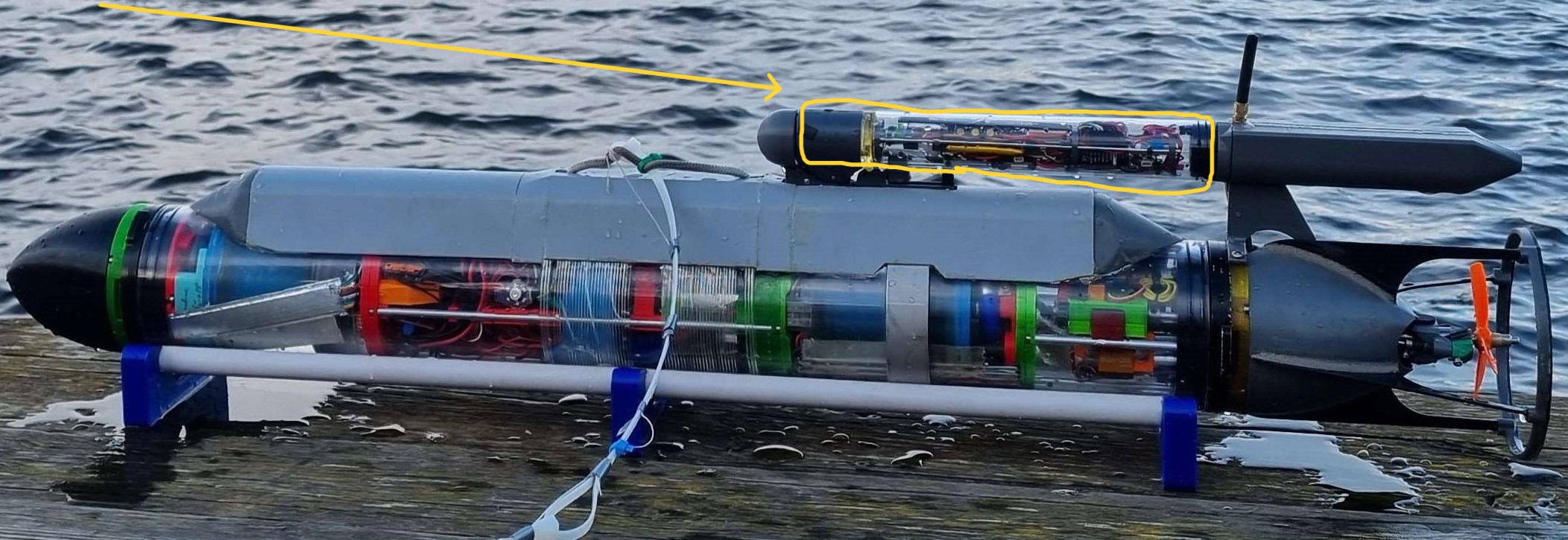
Fast forward five years and here it is. Ålen. Or “The Eel” in English.

Last month, to our great joy, we successfully completed the mission. Friends and families were there to cheer us on, and we had a big TV set up that showed some telemetry during the run.
 Ålen")
Low cost DIY AUVs still is quite a niche thing. And people use all kinds of interesting sensors and techniques to move around, steer, navigate, dive and observe the world around them. And they use them for all sort of different applications, or no applications at all. Maybe just to prove to themselft that the thing sort of works as intended, like we did ![]()
For that reason I thought it maybe could be of interest to share some design ideas that we went with. There are quite a lot of sub systems (pun intended) on our AUV so I’ll try and keep it brief and separate it in different posts.
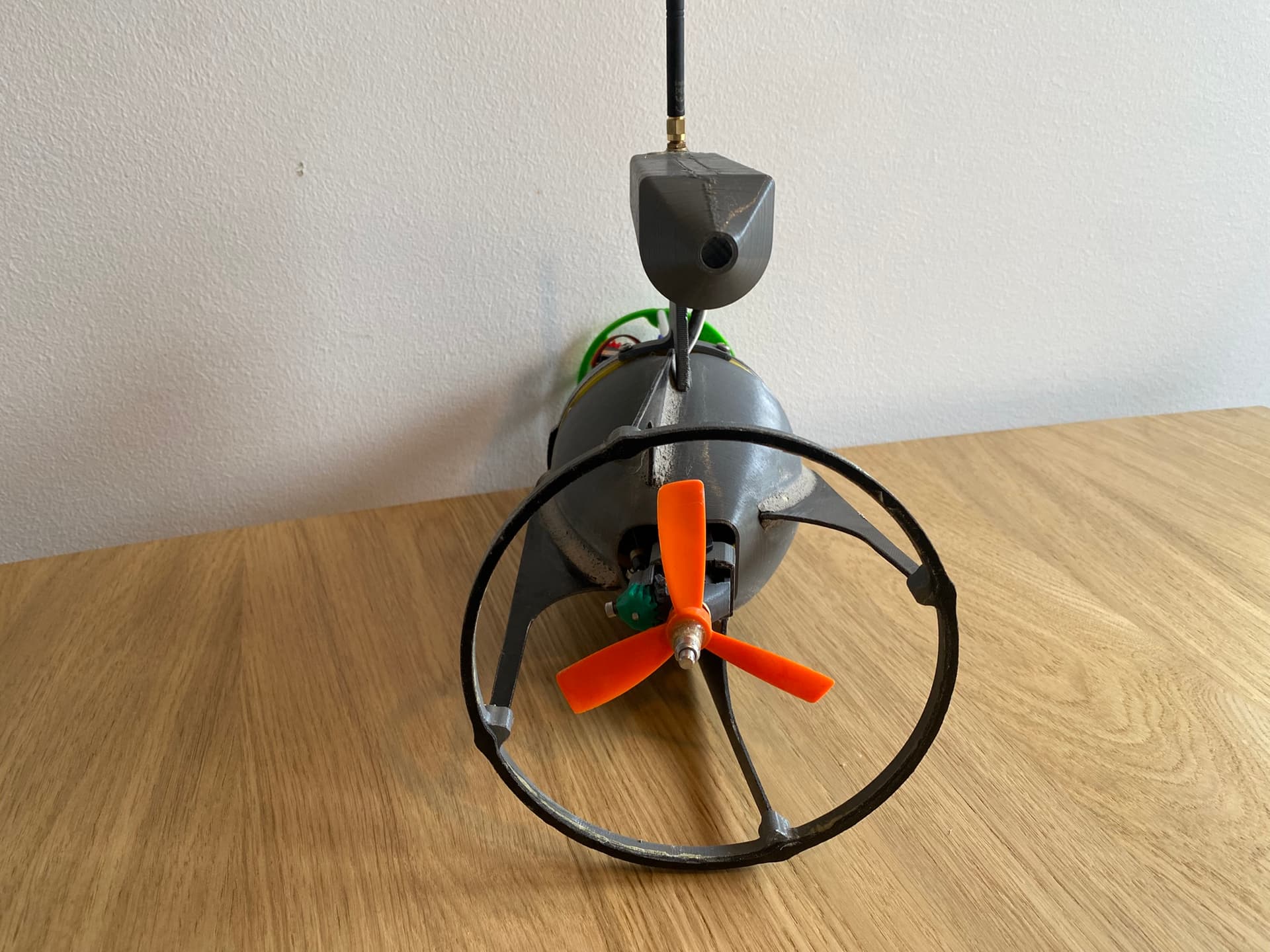
Propulsion and maneuvering

Here we let our mechanical mind go a bit wild before coming up with this idea. We thought it would be cool if we could combine pitch and yaw motion with only one control rod.
So, there is a cheap but powerful enough geared brushed motor in the dry WTC with a shaft going through the endcap and a small radial seal. Then a universal joint connects the shaft to the propeller. The universal joint in turn is coupled with a linkage and a gear that basically connects to the control rod. When the control rod is moved in/out this steers the propeller in yaw. And when the control rod rotates, it controls pitch.Two servos, one on top of the other does the moving and rotating.
We have since refined the servo setup and made it more rigid, but the basic principle remains.
To prevent the torque from the motor to roll the AUV, we use a long 10x10mm stainless steel bar to act as a keel. Also, the fixed fins on the back of the AUV are angled slightly to counteract the roll when at some speed. Max speed at the moment is 1 m/s.
Pros:
- Works surprisingly well to thrust vector the propeller and gives great maneuverability
- One less control rod to penetrate the hull which is always a good thing.
Cons:
- Having control rods and shafts at all penetrating the WTC is always risky if not done properly
- The mechanism and the universal joint itself needs to be made more rugged or encapsulated in some way to protect it from debris and the hard environment of the ocean.
If you found this interesting, my next post will be about our novel dual ballast tank/pump solution. And then our emergency rescue buoy.
More info can also be found on https://www.foxpoint.se/
Cheers!