I had already finished the part of “Setup th RPi” and “Setting up the Pixhawk”
And the network had been finished, too.
I built a linux system on vmware.
And I used PuTTy to connect the RPi by SSH on linux system above.
The required packages had been downloaded and installed already.
But…I have a question now.
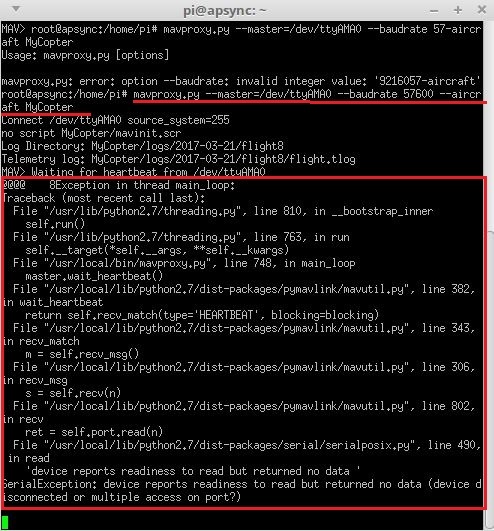
When I used this command
“mavproxy.py --master=/dev/ttyAMA0 --baudrate 57600 --aircraft MyCopter”
It showed these information like the picture
How is the Pixhawk connected to the Raspberry Pi? USB? If you are using USB, you should use /dev/ttyACM0 for ‘master’, if you are using the RX/TX pins on the Raspberry Pi, make sure you have disabled the console login on the serial interface.
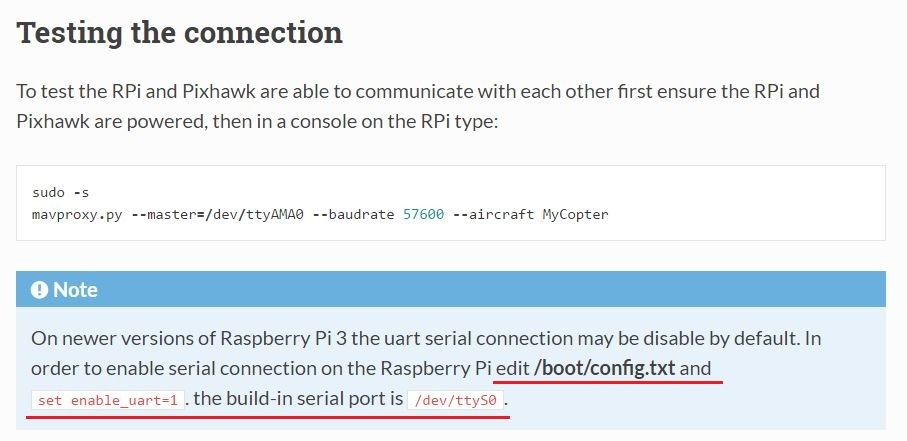
I connected the RPi and the pixhawk by using the RX/TX pins.
If I disable the console login on serial interface, the “enable_uart” will be set 0.
But this note show I need to set it 1
Genius!!!
I solved this terrible problem !!!
They connected with each other, and they can give command to the other one!!!
I can control pixhawk by RPi3 !!
Jacob! I really appreciate for your help and comments!!!
Thank you very very much !!!
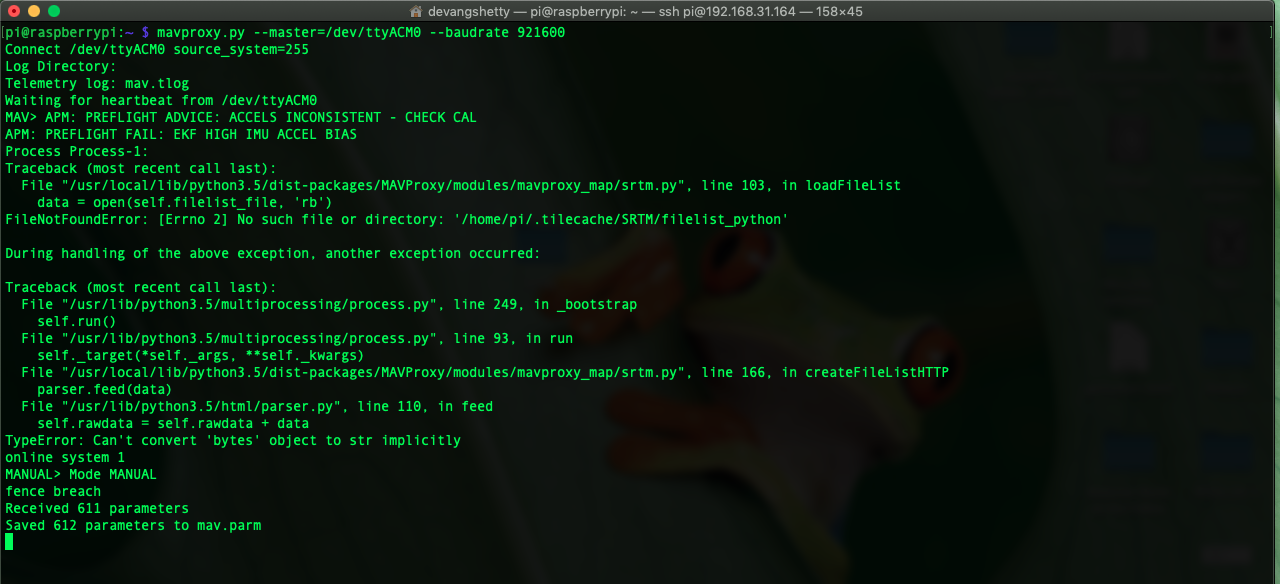
Guys please help me resolve this issue, I have ssh(ed) into my pi and downloaded and installed all the libraries, my Pixhawk in connected over USB but I’m getting this error please help me resolve it.
I am following the standard Dev docs to make the connection between the Pi and the pixhawk