Introducing DeepWater Exploration’s latest innovation: the explore3D. This is the world’s most affordable and smallest subsea stereo camera system, offering a total resolution of 4MP with a Global Shutter sensor, all through USB 2.0 output. It features Frame-Sync capability with nanosecond accuracy and incorporates our proprietary Aquagon™ lens technology, which eliminates distortion and chromatic aberration, making it perfect for stereoscopic vision. These advanced features are packaged in a user-friendly design, available in configurations rated for 1,000, 6,000, or 12,000 meters of water depth. The baselength of the stereo can be configured for optimal 3D imaging at various working distances.
Utilizing two stellarHD cameras on a precision-calibrated bracket—equipped with a modern Global Shutter sensor and proprietary PCB—you can capture synchronized video like never before. With our frame-syncing technology, you can achieve simultaneously synchronized video at 60 FPS.
Furthermore, as a UVC-compliant device, the explore3D is the first plug-and-play stereo vision capable subsea system. This makes explore3D the ideal choice for anyone seeking to develop a modern 3D data capture system.
Integrate this into your existing 3D reconstruction/scanning, SLAM, point-cloud, and/or other software, or keep an eye out for the new DeepWater Exploration software platform later this year.
We are currently in the works for gathering as much data as we can to provide underwater results. We will keep this forum updated with any new data we get. The entire system is depth rated to 1000 meters with a safety factor of 2X.
Thanks for your interest in our new product and we are happy to answer any questions!
The cameras interface via 2 separate USB ports like our other cameras. The USB cable has an additional wire for frame synchronization. This design allows modularity between the 2 cameras, customers can choose their ideal base length and integrate it nicely into their vehicle without the bracket frame.
The point cloud generation is not generated on the cameras. However, there are several options for customers to run the software.
They can run it directly on their BlueROV if they upgrade it with a Jetson or add our SVC Pro. There is a possibility of running it on the Pi as well but with lower FPS.
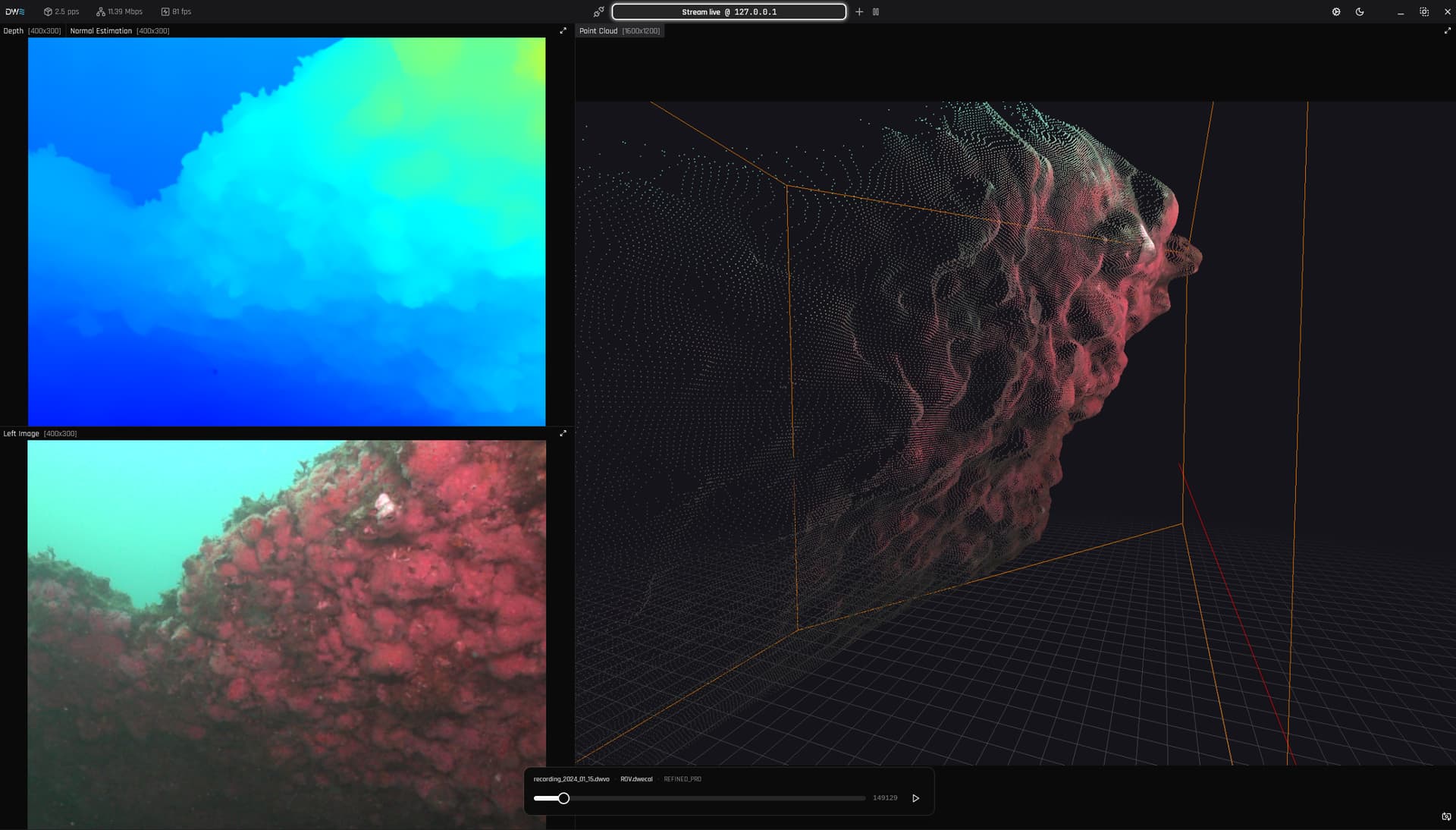
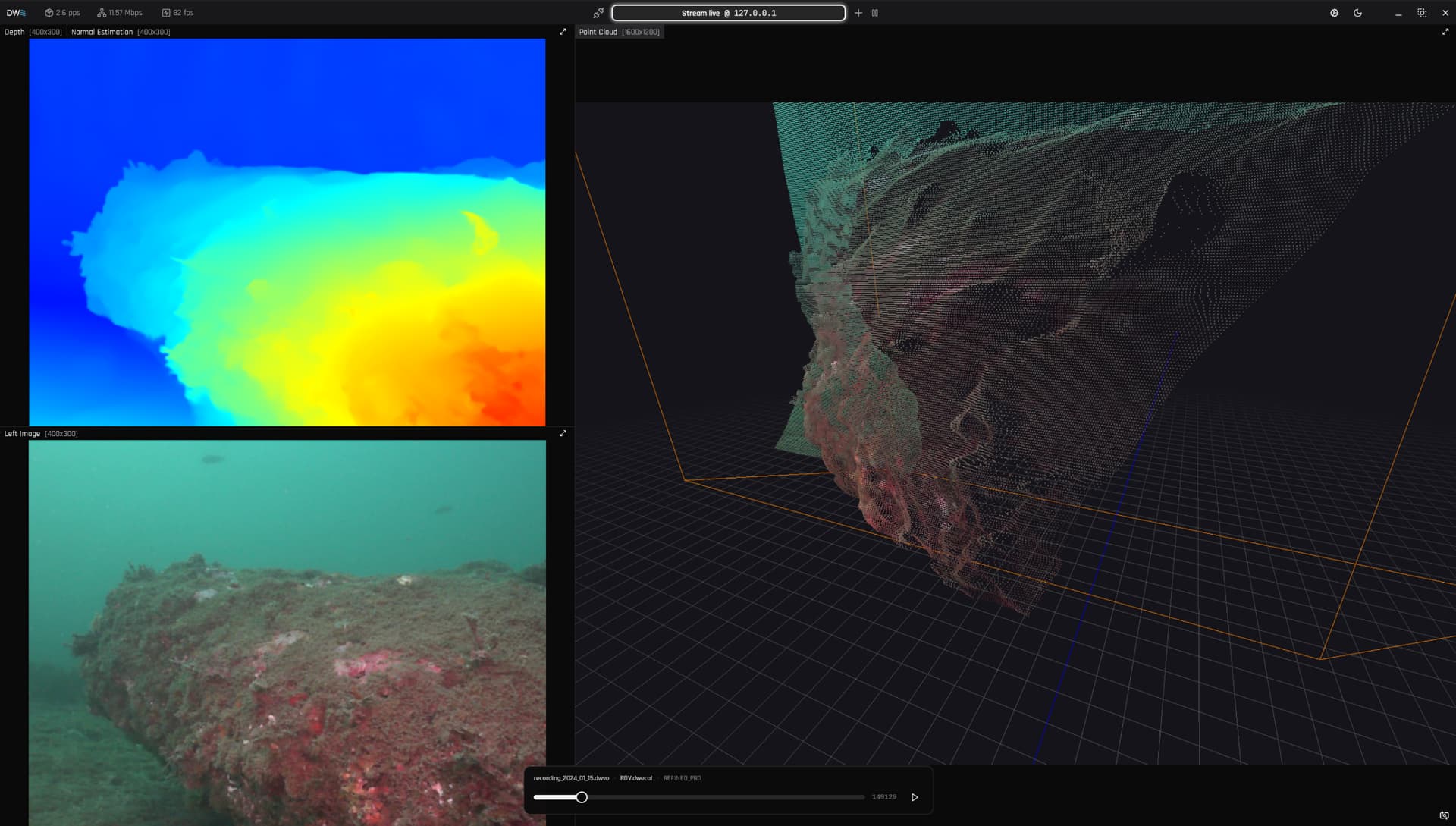
The other option is to stream the synchronized videos to the surface via the Pi. As there are no readily and reliable methods for sending 2 synchronized video, we made our own streaming pipeline, which will be included with the free SDK. This is what we used for our setup. We have the 2 cameras on the ROV connected to the Pi, synchronized, and then sent to the surface. On the topside, you can have a laptop with an Nvidia GPU or Nvidia Jetson that can process the frames and run the point cloud.
The software screenshots shown is our own software as of now. There are also methods of running it with OpenCV as well.
We are still finalizing the software and SDK. Let me know if you have any ideas for an optimized solution for BlueROV.
Amazing work, do you have an approximate idea of when the software/SDK will be available ?
I already have 2 StellarHD cameras and built a custom frame for underwater stereo vision, so will it be possible to only order the software/SDK without the whole cameras/frame/software package ?
Thanks so much for the kind words! Your custom rig sounds amazing.
We should have the SDK ready by the next few months!
You will not need new hardware assuming its stellarHDs with Aquagon Optics. While its not impossible for it to work with our standard fish eye lens, Aquagon will provide you the best results as it has virtually no distortion or any aberrations. To see the difference, you can view it here!
You will also need to make sure the cameras are synced properly. For 60FPS, you can have the camera set as lead-follow mode. For any other FPS, you will need an external sync signal which we can provide a kit for that interacts with the Raspberry Pi.
We have a whole calibration process that will be part of the SDK.