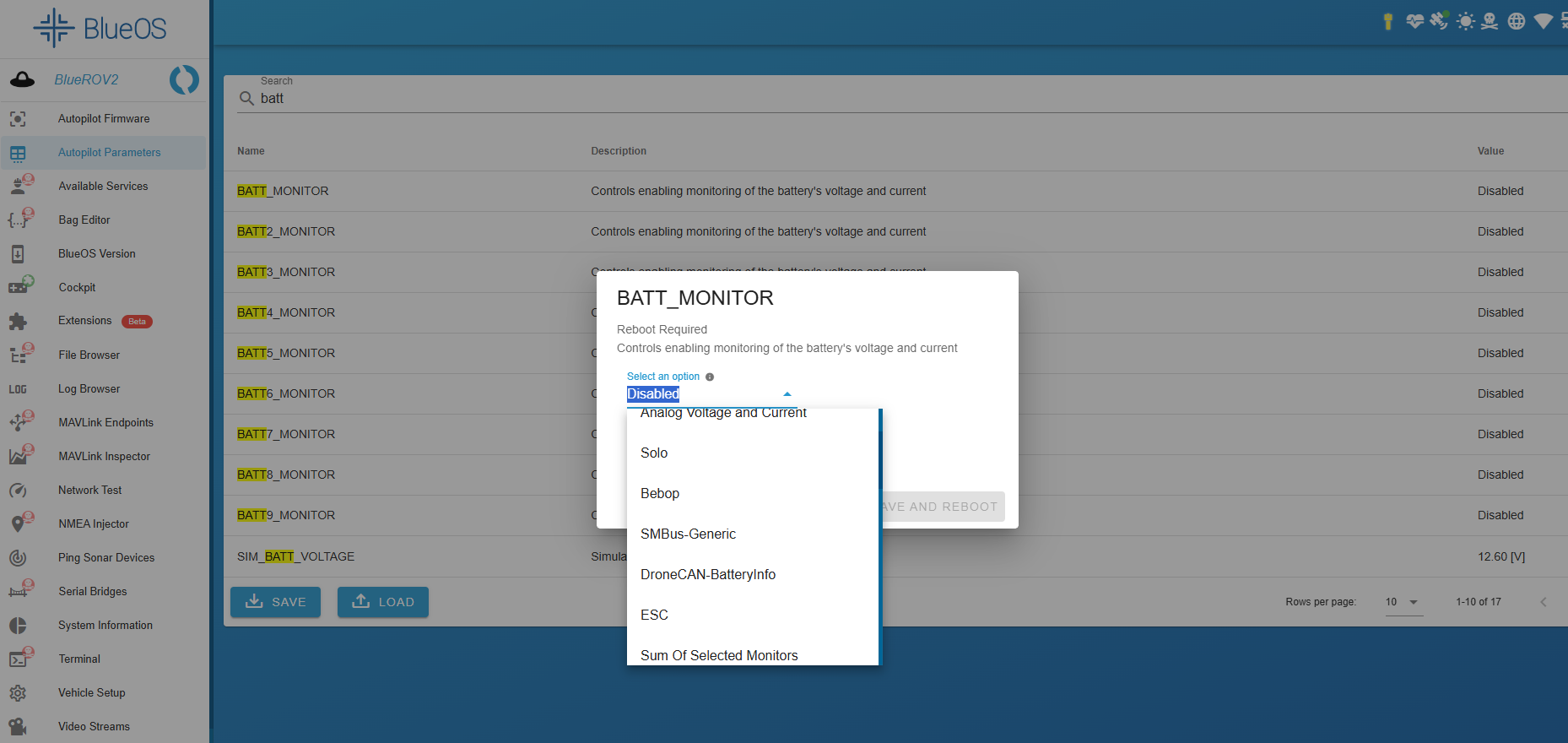
As far as I can tell, BlueROV is configured to use an analog voltage output type sensor for both current and voltage by default, but the core Ardupilot code has many other options for battery monitoring, including SMbus. This is edited via the “BATT_MONITOR” parameter. I’m thinking I can use the option “SMBus-Generic” and set the associated “BATT_I2C_BUS” and “BATT_I2C_ADDR” to match the I2C bus that is physically present on your navigator PCB? I can’t see how this would not work?

Regarding your suggestion for 3.3V serial - do you mean an actual UART or I2C? I didn’t see an option for a UART battery monitor but I could consider that if you think that would really be the best fit for your navigator PCB.
Regarding the Cobalt connector - I have discussed the ratings with Blue Trail Engineering and they have said that the ratings they publish are very conservative. There are really two considerations when it comes to current ratings in connectors and wiring: voltage drop due to resistance and the thermal heating associated with this. the cobalt 14 - 4 pin uses approximately 3.5mm bullet connectors internally, which are the same as the well known and characterized XT60 connector, which is “rated” for 60A continuous. The cobalts also use high temperature PEEK insulation plastic around the contacts vs the nylon used in the XT connectors. Additionally, the rating of the cobalts I believe is for all 4 conductors conducting 35A simultaneously vs the two in my proposed use case, so the heating will be much less. Blue Trail sells a Blue ROV Cobalts standard series connector battery conversion kit that uses the smaller size 4 pin cobalt connector and does use two wires each for ground and battery V. They rate these at 20A each, so a total of 40A is the published rated value. I assume people have been using these kits without issue so that is a nice existence proof as well.
The right thing to do is do a test: I’ll try to run current through the proposed connector and take some thermal images or thermocouple readings of the pins.
There is a helpful post where the max current of the BlueROV is discussed by Adam from Blue Robotics here:
It sounds like typically BlueROV uses around 20A, and peaks around 60A to 90A for a few seconds. I would love to see some more data if anyone has it for very aggressive maneuvering?
Yes, my batteries will be using T1S ethernet natively. If you’re next gen ROVs are going to use that it would be awesome! I’ve love to help with a standard spec development too.
Yes, I’m planning on matching the enclosure dimensions of the existing 3" battery enclosure.
Regarding safety - yes, the charger will perform the standard CC-CV charging method and cell balance will be handled by the BMS that is inside the battery enclosure.