My ROV uses rotating side thrusters which have worked well in shallow dives but at some point the simple thrust washer will jam the motor. A thrust bearing in the water is asking for trouble. Another requirement I have is to rotate my BlueRobotics Ping sonar altimeter over 90 degrees.
This is the thruster rotate assembly out of the ROV. Not shown is the ROV body that separates the mechanism from the water.

The simplest way to deal with pressure and the need for a thrust bearing is to use a shaft that goes completely through the container. The pressure is the same on each end and simple circlips can be used to hold the shaft in position. Fig 1. This setup would be idea for rotating Side Thrusters.

It is always a problem coupling to the shaft.
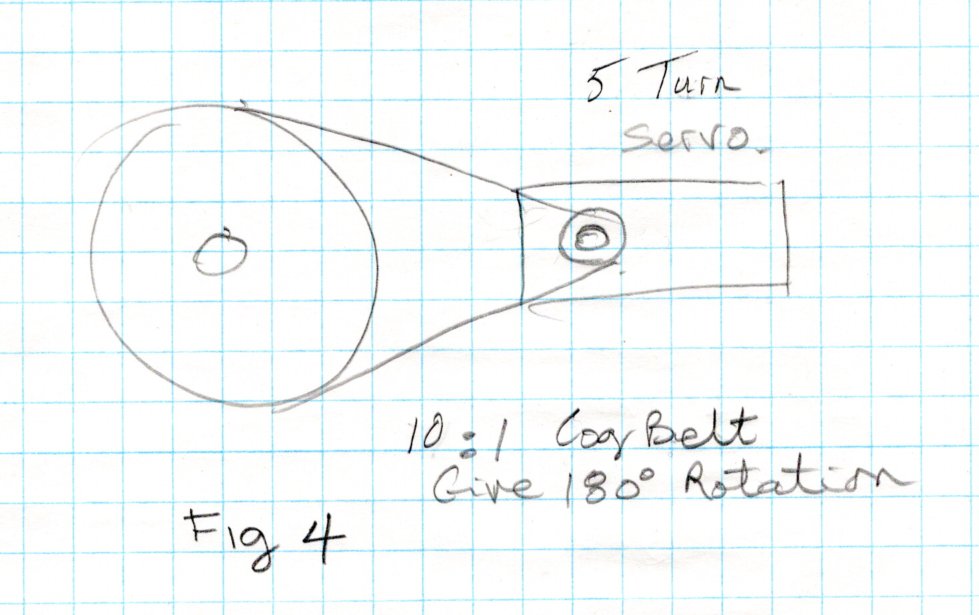
I have been using sprockets and cog belts from The Robotshop (Fingertech products). They could couple to a 5 turn Servo motor to increase the power.
Another way to deal with a single ended shaft is to put a thrust bearing inside at the opposite side of the container. However the shaft needs a belt to turn it and gets in the way of the servo making for a very big container.
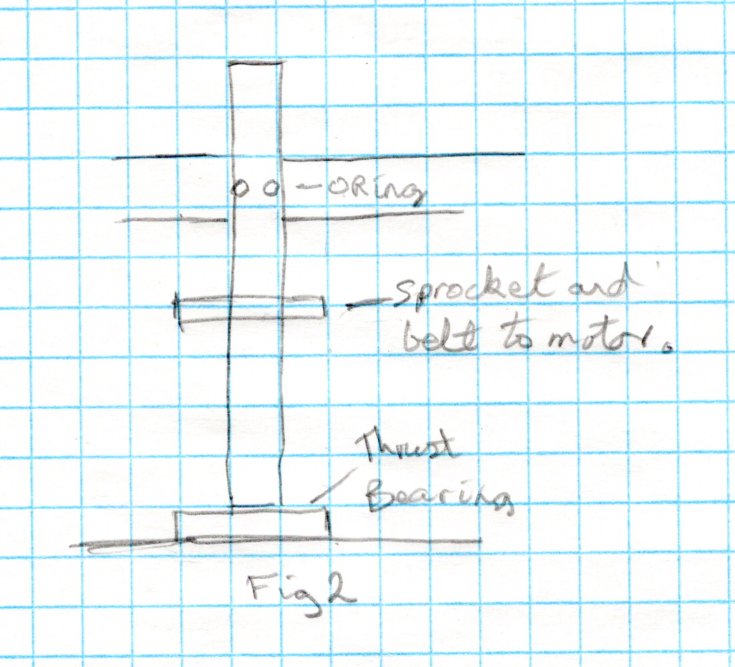
If the thrust bearing is placed at the entrance after the O-ring then the shaft can be coupled directly to the servo.
The container is round and the shaft is offset. Water pressure holds the lid on so only 3 screws are needed.
The only precision is the fitting of the O-rings.
The servo can be a regular RC type up to the powerful ones sold by Servo City which would require a bigger container.


