Hi Folks,
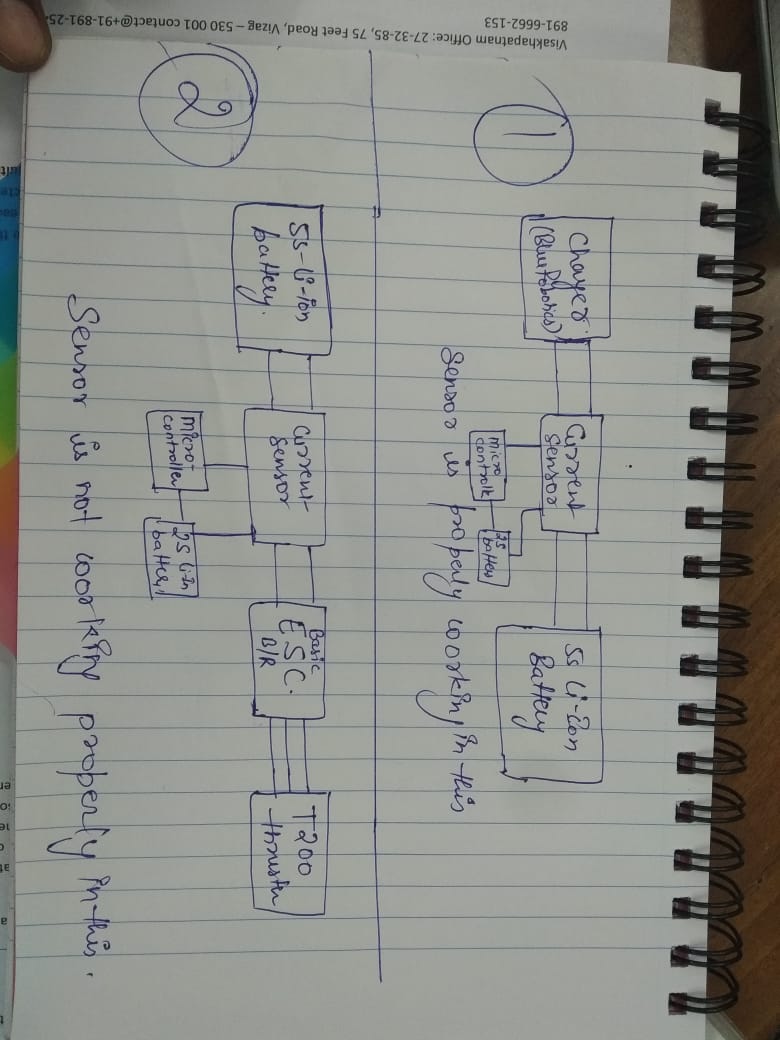
I am using WCS1800 current sensors to read the current consumption by one thruster, its range is upto 35A for DC currents so it is in our working range 1A/66mV. It is working almost accurate as I have tested with a 5S Li-In battery and battery-charger given by Bluerobotics itself, the current value for charging which display on LCD of charger exactly matches with my sensor output, so I found it is perfectly calibrated. But the same sensor If I am using to measure the current consumption of T200 then I am getting erraneous value and that too around 50% error. Anyone please can help me out to find out the issue behind this. I think it was EMI or RFI from battery, so I made my thruster ESC apart from battery around 2 mts disthance, but still I am facing the same issue. Or if this issue is because the switching process happening inside the ESC or anything else.
Thanks in advance