Hi,
I’m trying to use my moos-ivp speed and heading to control my blueboat. I have generated the SET_ATTITUDE_TARGET message through moos app and I tested locally that I can received the mavlink message that both speed and heading will be generated by moos.
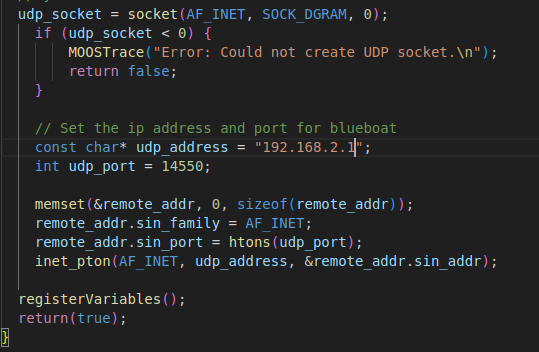
Then I tried to send this message to my qGroundcontrol. I wrote the code like this:

Then I connected the basestation wifi and added comm links as the same server address and port.

After I connected the this link and changed the guided model and armed my motor, both of them tried to rotate as maximum speed which is weird and cann’t received the message I have sent. Any suggestions is welcome!! Thanks for your time