Hi There,
We’ve successfully been able to integrate a ping/ping2 sonar to our blue boat and I thought I’d share the experience.
Wiring
In short, wiring the ping up using an off the shelf 6-pin JST 6 pin pigtail connector to Serial 4 on the navigator was straight forward and, after a minute or two, the blueOS software recognized it.
Mounting
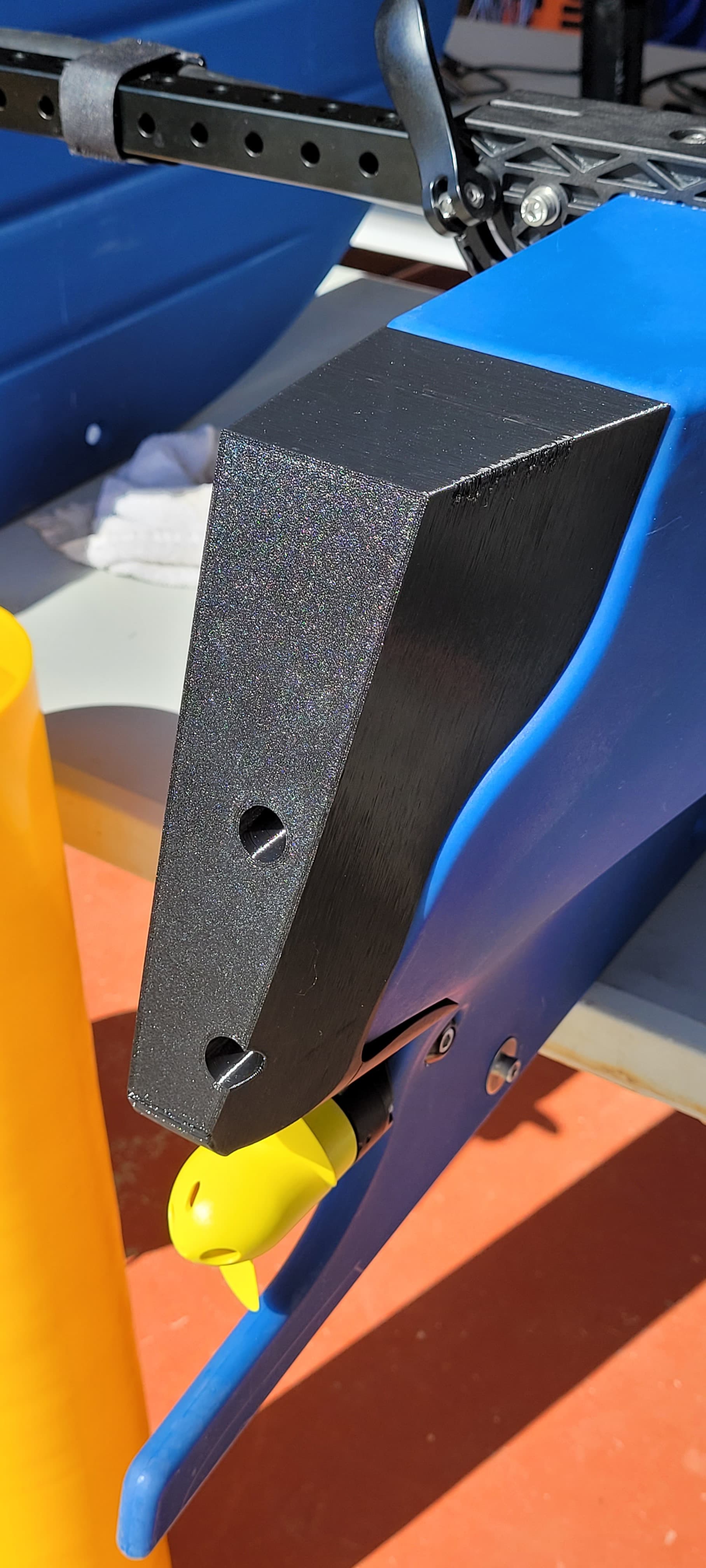
For the mount, we wanted to be able to remove or replace the sonar, and opted for a 4-pin cobalt series bulkhead connector from BlueTrail. We mounted this through the spare port on the stern end of the starboard pontoon. (next to the thruster port) Again, this went fine, except that the cobalt bulkheads are about 15mm longer than the wetlink bulkhead used for the thruster. This was only an issue after we went to put the starboard hull fairing back on and it didn’t fit. I had one of our engineers sketch and 3D print a new fairing (see pics) and it works but isn’t as elegant as the Blueboat factory part (Body98 in the step file). It wasn’t possible to just extend the fairing given the complexity of the shape. It’d be nice if future versions of the blue boat allowed for the use of removable bulkheads, and made a bit more room on these fairings.
We took a similar approach to mounting the ping to the hull and 3D printed a mount that attaches to the stern-most hole in the hull. This worked well and gives the ping a bit of protection.
QGC Integration
Again, this came through automatically and shows up in QGC as Rangefinder distance. in the QGC mavlink inspector it shows up as RangeFinder(173).
If anyone else is looking to do this, we’re happy to share the 3D print files of the fairing and/or the mount. Note that our mount is for the ping1 and the hoels might vary for the ping2.
very cool @PaulBarter !
I’m curious why you didn’t want to move your cobalt connector to the top-deck of the BlueBoat - we chose to bring the cable in the stern, not the lid, with our official integration hardware to keep the hatch assembly detachable from the boat, for bench testing. This would be possible with your setup, and then you could use the original rear fairing?
The mount looks fairly hydrodynamic, but adding a bit more sweep to the back of it may reduce the drag - like the official version:
Also, a single mounting point is great, but take care to keep it parallel to the hull/water surface to ensure accurate measurements!
The Ping and Ping2 have the same mounting holes, I believe…
Eager to see maps you may generate - the log files from the vehicle will contain the depth information, but with no confidence data recorded alongside it. That’s what motivated the extension that is detailed in this guide.
Happy motoring!
Thanks @tony-white,
We actually did a lot of this integration before the official integration hardware was available. I agree that our mount could be more hydrodynamic and the sweep between two mounting holes makes sense. We used what we had on hand which was a ping with a pigtail already spliced into a cobalt four pin connector. We used the starboard stern bulkhead port mostly to keep it tidy and to keep as many hatch ports available as possible. I’m really pleased to see so many spares available now for the blueboat. I see us setting up the starboard side with the essential components and leaving the port side for project specific payloads.
Can you confirm that the survey extension works for both the ping and ping2? We’ve got a ping mounted currently. I did load the extension but it never seemed to do anything. Perhaps it’s because I’ve only been bench testing it in a 1m deep bucket so maybe I’m not getting a reliable signal back.
Cheers and thanks for the timely reply.
-paul
Hi @PaulBarter -
Very cool!
The survey extension will work for either Ping unit, yes. You need to make sure that the Mavlink Messages are turned on, under the Ping Sonar devices BlueOS menu (good to verify the Ping is recognized here as well.)
When you click the play button in the extension, if you have GPS lock, the map should center on the boat. Data won’t show up on the map unless the confidence value is greater than 95%, but it is recording all data to the .csv file you can download.
Please let me know if you’re not able to get the extension behaving properly!