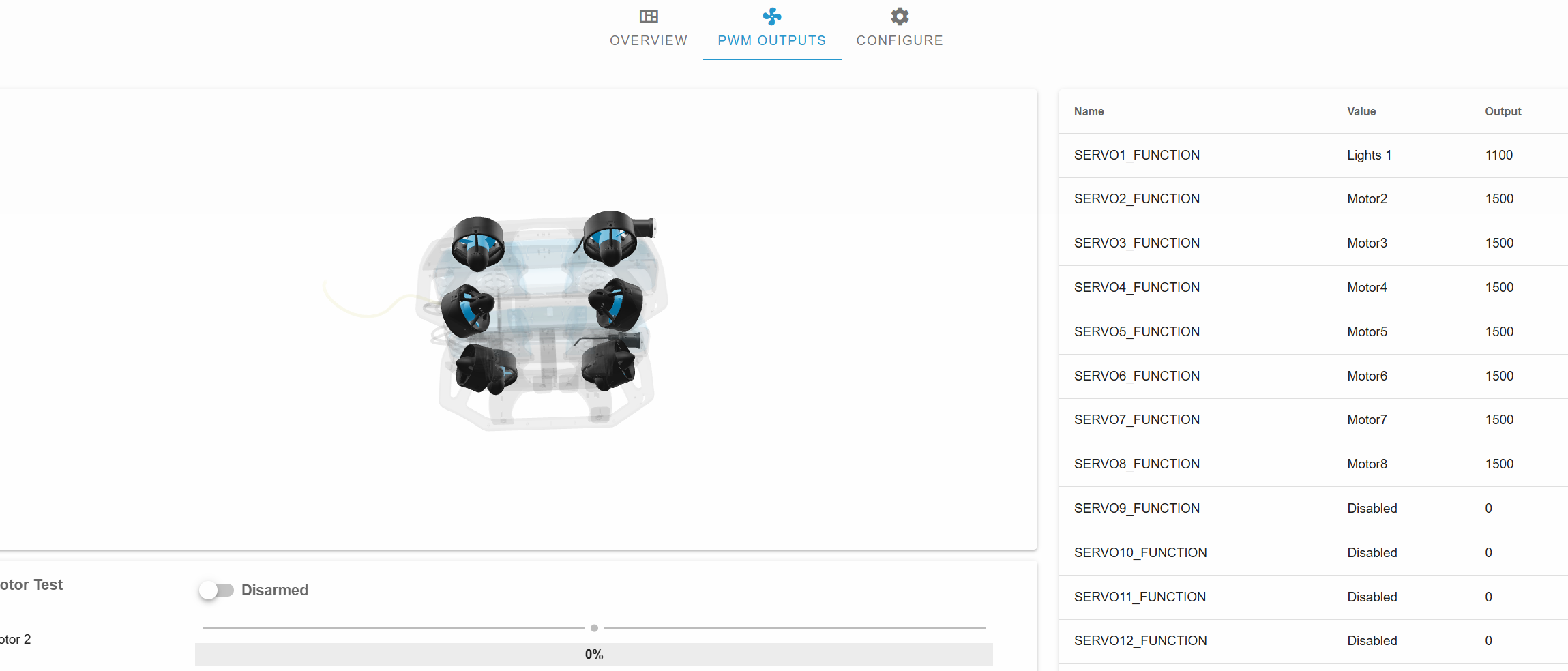
The motor test sliders are specifically intended for the vehicle motion motors/thrusters, which requires the vehicle to be armed (hence the “disarmed” toggle switch). Those sliders are linked to whichever pins the MotorN servo functions are specified as. In this case it looks like SERVO2_FUNCTION is assigned to Motor2, so the slider for Motor2 should be moving a motor connected to servo channel (output pin) 2.
Did the motor beep when you plugged it in? There should be three, short, rising beeps to indicate the three phases are connected correctly, then a low, long beep once a valid PWM signal is detected, followed by a high, long beep once a neutral (1500 µs pulse-duration) PWM signal is detected, after which the ESC is armed and will allow moving the motor.
If the first three beeps didn’t happen then there’s an issue with the connection of the motor to the ESC, or the ESC isn’t powered correctly. If the last two didn’t occur then there’s either an issue with the signal wire connection, or the signal being sent over it.
Flight controller outputs are the domain of the autopilot firmware (ArduSub in this case), so which ones should be configured, and to what values, will not be found in the BlueOS documentation, which instead just tells you more generally how to configure autopilot parameters.
Unfortunately the ArduSub documentation is somewhat in flux at the moment, because it’s being transferred to a new site and largely rewritten, and ArduSub itself is also undergoing updates which change some of this functionality. For now, this is the old “servo output” documentation, with respect to joystick button functions. There is newer buttons documentation, but it doesn’t yet describe what the functions do.
In short, if you want to use the servo_1_* joystick button functions (which you can assign to your joystick buttons of choice in Cockpit or QGroundControl), you should connect your M200 to servo output pin 9, and set the SERVO9_FUNCTION to Disabled (0) (so it’s not being actively managed by an autopilot functionality).
Lights controls are more versatile, because you can specify them on arbitrary output pins, but then it’s less easy to get a consistent 1500µs neutral signal, which is required before the ESC will allow any motion to occur.
Using a standard motion MotorN function is also possible, but then you don’t have manual control over that motor in normal operation (only in a special motor testing mode), and using the motor requires the autopilot to be armed first.