OVERVIEW
This is a quick version of my review. I will probably add to is as I remember things and spend more time with it.
I recently got the DeepVision DE680D (DeepEye) Side scan system. The delivered price to me was $11,263.08, so I think it has a decent value for the money when you consider what the “professional” units cost. It was shipped very fast from Sweeden and actually spend more time in Customs than it spent getting to America. The system is extremely portable and I only need the Pelican case, Spool, and a laptop to run the system.

I even took it out in my inflatable boat with my dad once

It didn’t come with a GPS unit so I bought a generic NMEA USB one that is compatible. The GPS is only required for recording the GPS positions on the sidescan waterfall and for the chartplotter. The Deep View sidescan software came on a cool metal USB drive that has an o-ring sealed cap. I took a picture but can’t find it now.
Here’s a quick video I took. I was trying to show the curve of the tether. It didn’t work since there’s not enough tether out and visibility isn’t good enough to see it when it’s down farther.

The software supports scanning at either 1.5 or 3 knots. It can even be relaxing or even very boring to watch the waterfall show nothing interesting while we cruise around at 3 knots at a constant bearing. Unfortunately, the boat that I used has a minimum speed of slightly under 3 knots and a loose steering linkage so I wasn’t able to get optimal image quality from it. I had a hard time getting the towfish below the big 60’ thermocline. I think i would need to be going 1.5 knots for deeper exploration.
Overall the sidescan is very efficient for exploring since I can cover a large area quickly. I found a bunch of new shipwrecks and other interesting looking targets for ROV exploration next summer. I added the lengths of all of my scan files and it looks like I scanned 405,730 feet (76.8 miles) linearly. With a swath of 656’ means the rough square area of 266,158,880 square feet (50,408.8 miles), but that sounds wrong. I do believe that I scanned 76.9 miles.

Area scanned in the north half of the lake:

Area scanned in the south half of the lake:

CASE

It’s a Pelican 1700 case with a handles on both sides and wheels on the long end which makes it easy to move around. It’s also Pelican branded so it’s absurdly overpriced. DeepVision requires it to ship the sonar. I think that DeepVision did a great job with it and it looks very nice on the inside. They have the company name engraved about 1/4" deep in the lower corner and there’s pockets to fit all of the different parts.

TOWFISH
I chose the 680 KHz version since I wanted the image quality and didn’t want to spend the extra money for the dual frequency version. I read somewhere that it’s 10% CHIRP (symmetrical 5%), but I don’t remember where I saw that. It has 4 pin Subconn connectors and came with a set of ‘blanks’ to protect the connections when it’s not in use. My only complaint is that the TIG welds on the shackle mount look a little undersized. For the visual style I think the towfish also looks great.


TETHER AND SPOOL
My first complaint is that the shackle on the end of the tether had a burr from the manufacturing process. I though that I could bend it to knock it off, but it just sliced my finger. It’s obviously isn’t DeepVision’s fault since it’s a purchase part.

The Subconn connector on the tether has a rubber strap that holds the connection securely to the towfish, and my other complaint is that it doesn’t look like it’s easily replaceable if the rubber starts cracking or gets a cut somehow.

The spool is Schill brand and made in Germany. It’s made of somewhat cheap feeling plastic, but otherwise fulfills it’s propose. What doesn’t work great is the spool resistance system. It’s a plastic screw with a rubber foot. The problem with it is that the resistance screw turns itself as it rubs against the spool and tightens itself when I just want a little resistance. So either the spool is locked and I can’t pull more tether out or it’s free spinning and makes a mess. There is no in-between. I’m thinking about replacing it and adding a jam nut to solve this problem.




The tether feels strong and durable. I remember reading that it’s Kevlar reinforced. A thing to consider is that the towfish is hard to pull in when it is 14.8 pounds negatively buoyant and there’s several hundred feet of the tether dragging in the water with the boat moving at 3 knots. I could pull it in at maybe 2 feet per second, but it makes the muscles in my arms hurt and I almost got blisters on my fingers. I was planning on trying to wear gloves but I kept forgetting to bring them. It uses a double prusik knot to secure the tether and it holds great, but it’s hard to pull the tether in with 2 hands since it keeps self tightening on me. It would be a lot easier with 3 hands, but I think I stated to figure out a workable technique.

An important consideration is that there were a few times where there was an underwater ridge that suddenly changed the bottom depth from about 120 to less than 60, so it might not be possible to pull the towfish up in time to avoid a collision if you aren’t careful. Here’s a time when the bottom was reasonably flat and a ridge caught me by surprise. The only way that the towfish was saved was because we hit the throttle on the boat and used the drag to lift the towfish up. The downsides are that any impacts would have been much worse since I had to accelerate the towfish to 15+ knots.

GPS tracked Mosaic view of that event. We cleared the first ridge but the second one was coming up a lot faster.

Here’s a good view of the bottom coming up as we went into a bay:

SURFACE UNIT
The Surface Unit has a threaded Bulgin Buccaneer brand IP68 rated Mini-USB connector. The matching USB cable is ChingLung branded. The other connector of the Surface Unit is a 4 pin Fischer branded connection. It’s easy to connect and remove and I just need to line up the red dots on each side. The male-male cable that goes between the surface unit and the spool looks and feels like it’s made of the same cable as the main tether.


DEEPVIEW SOFWARE
The software was expensive, but it just has a lifetime license so I won’t need to renew it and it sounds like the license will transfer to my future computers as I upgrade my laptop. It also can show a low quality mosaic of my scans on Google Earth, with is great for visualizing how much that I scanned.
The worst thing that I can say about it is that the usability feels clunky like it’s a 20 year old software. For example, There isn’t any shortcut button on the toolbar to add markers. I need to right click on the waterfall and then choose “Set Markers”. Then I click where I want the markers. Then to rename the marker I need to scroll down on the Project navigator and then Right click on the marker name to go to properties. I then can rename the marker. This whole process can take 20 or 30 seconds and during that whole time I’m not watching the waterfall.
The chartplotter is nice since it automatically makes a mosaic and shows the range of my scan while I’m scanning which helps line up following passes so I know if I’m overlapping my scan area or not. Previous tracks are green and the current track that I’m recording is red.

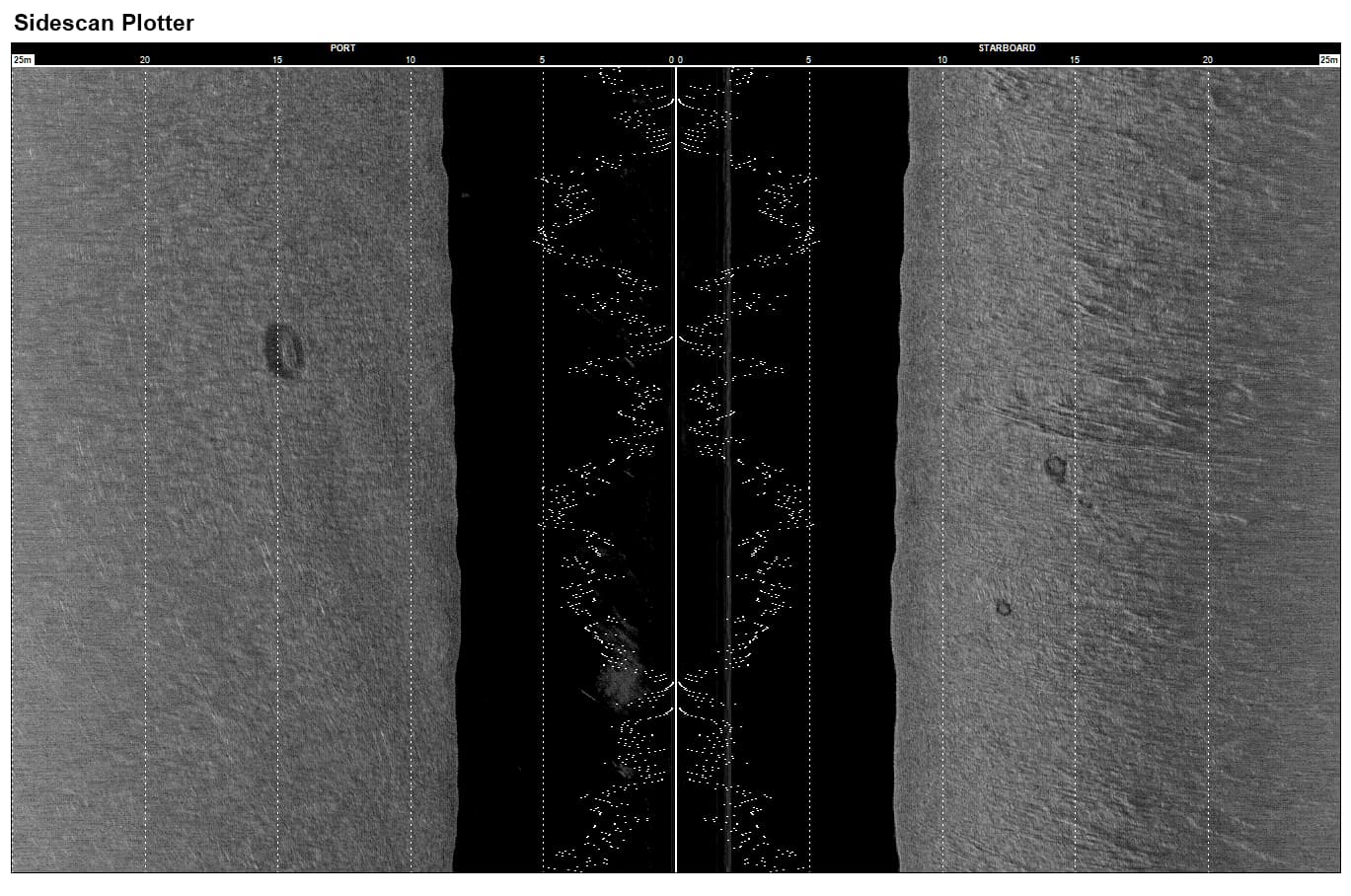
Interesting Targets Mega Montage
Not sure what that is

Probably a shipwreck. 60’ thermocline washed out the image.

Idaho shipwreck

Interesting bottom texture

Going past a marina. There was some waves bouncing my boat and distorting the image

3 Shipwrecks. The big one in the middle is the Seeweewana

Another marina

Sand Star wreck

I-90 highway bridge

Watch out when you go around a point since the bottom comes up in a hurry. I had to pull the towfish out of the water just to be safe.

Water pump?

Harrison wreck

There’s that pickup truck from one of my Beauty Bay videos

Anchor drag marks?

Square thing






Shipwreck?

These round things showed up a few times. There’s always a few in a line. I will investigate next summer.


Shipwreck

Shipwreck?


Shipwreck

Shipwreck?

Underwater hill. I though it looks interesting

Shipwreck

Shipwreck

Shipwreck

Shipwreck?

You can barely see some shadows caused by the dock pilings


Small boat?


Might be a tree




Tree?

This is what buoys look like



2 Shipwrecks I already posted about

Above the thermocline