Hello guys,
I think we have an issue with one of our BlueROV Heavy configuration build.
Hello @Synchron
It is more likely that your power module is misconfigured.
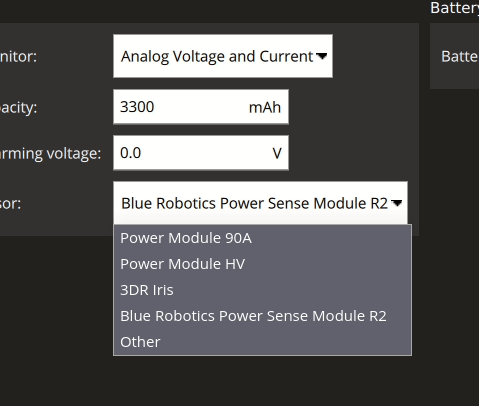
Note that there are two versions of the Power Module out there. We have instructions to identify and setup them here .
The CPU usage should not be a problem. It is mostly caused by mavproxy, which runs regardless of QGC being connected.
OK, but inside QGC I have only Power Module 90A, Power Modeule HV, 3Dr IRIS and Other. I’m running the last QGC 3.2.4 rev.6
We now suggest that people use QGC 4.0, but it still has a few drawbacks.
mavlink:master ← Williangalvani:addPowerModule
opened 08:36PM - 20 Jun 19 UTC
This exposes the BATT_AMP_OFFSET parameter for ArduPilot vehicles and adds an en… try for the [Blue Robotics Power Sense Module R2](https://www.bluerobotics.com/store/comm-control-power/elec-packages/psm-asm-r2-rp/)
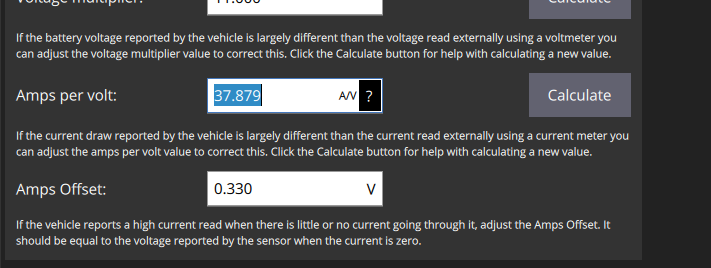
Note that BATT_AMP_OFFSET needs to be set via the parameter, as it is not exposed to the GUI in 3.2.4
Thanks, I will use 4.0. Problem solved!