For a project, we have ±3m/s current. We have equipped the BlueBoat with an ethernet current sensor, RTK positioning and survey software on a Windows PC. Experience shows that with our setup we can handle 2,5m/s of current.
To be more manoeuvrable we would like to add two extra M200’s. Extra batteries will power these motors and the extra ESC’s, the PWM we ‘copy’ from the existing BlueRobotics Navigator.
Hi @Willem -
Adding additional motors is an interesting idea, but I’m doubtful it is going to add much in the way of top speed… The cross-bar would likely cancel out any thrust advantage with the extra drag it creates! Additionally, even with 6S battery voltage and the “M500s” / larger props top speeds of only 3.8 m/s were achieved. The system is hull-speed limited, which you can see in the exponential increase in power required to achieve higher speeds:
This graph was made with the larger motors/props… The big challenge with this solution is the propellers protrude below the keel, so running the boat aground quickly destroys your propellers.. It’s generally not the safest configuration, hence it not being an official recommendation / upgrade path.
We do list the maximum speed of the standard BlueBoat, with only two batteries on board, as 3.0 m/s. If you have additional batteries or payload, this will be reduced due to the increased drag. Reducing your payload is likely the best bet to reaching those speeds! The Windows PC may be unnecessary, or able to be used over network connection and so not contribute to your payload mass?
What type of current sensor are you using? This is likely also significantly increasing your drag / limiting your top speed - do you have any pictures of your setup you could share?
For the project, we think that even with the increase in weight (batteries, ALU bracket), the increase of thrust (Kgf) will be sufficient to handle the 3m/s with more ease.
Any thoughts about that?
What do you think about the Kgf force of 4x M200, will that be 5.63x4KgF? (at 16V, at 1900 ESC PWM, 2751 RPM).
Also splitting the PWM signal to the other ESC, do you have experience with that?
Hi @Willem -
That’s a slick design! The additional thrust may get you to that speed, but it’s difficult to predict. Definitely share your results!
You may want to reduce the surface area of the horizontal plate? How do you plan to attach that cross member to the hulls?
The M200 product page gives bollard thrust for the motor with weedless prop, but the situation is much different when moving through the water. Rather than simulate, it’s often easiest to try and see!
The PWM signal can be split simply by splicing the wires - the PWM signal for the port motor should go to the other ESC for the motor on port side - easy!
Thanks, we are moving and ordering some parts to test it!
Is there a way to avoid splitting the PWMs, but by using dedicated pins on the navigator board and telling BlueOS to use the same controller stick inputs from motor 1 and 2?
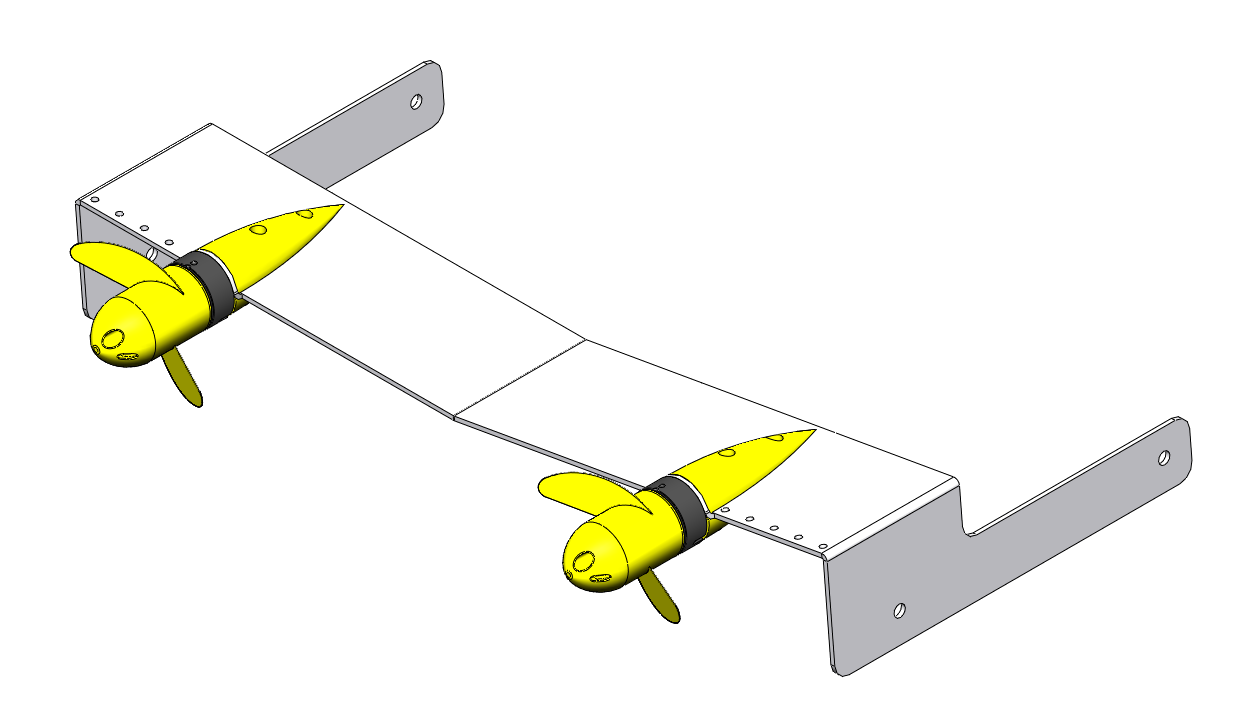
Test bracket details. The dent in the mid, is to create some stiffness.
We performed the test, and here are some figures! According to the Cockpit speed pointer, the max speed is 2.5m/s. We did not use a spring balance to measure the Kg force!
Quite happy with this setup!
Questions
Is the position of the extra props also where Bluerobotics would place them, given your knowledge about cavitation, prop wash, etc.?
With full throttle, the boat is slightly going to starboard?
One of the extra motor with all joysticks in the middle is slowly rotating, all PWM settings are the same! How can we stop/solve that?
Where to find the ‘update home button’ in Cockpit software? As soon as we start the survey, Bluatboat is sailing to Bluerobotics HQ?
What is the part number of Igus bearing ring in the motor?
Hi @Willem -
Congrats on your integration! I’m not quite sold on it - doubling the power consumption for a 1/2 m/s reduction in top speed (and likely a big hit in efficiency at 1m/s) doesn’t seem worthwhile, but it certainly increases the tow-force you can bring to bear…
In answer to your questions:
The BlueBoat was designed with efficiency in mind, so other than just not having 2 extra motors, I would say maximizing the spacing between all the motors present would be optimal.
If you run the boat in Acro mode, it will go straight - it is fairly typical for some asymmetrical drag or difference in motor RPM to lead to the vehicle not tracking straight in manual mode.
The motor that keeps rotating needs to have its SERVO#_TRIM parameter adjusted slightly up or down to stop the rotation.
Cockpit is not ready for “production” use with ArduRover and the BlueBoat. It is recommended to only use QGround Control unless you are testing improvements to the Cockpit software. By right clicking on the map, you can set a map home point, this should also be the vehicle home point.
You can order teh Igus bearing, 2 per motor, with a special order of BR-100917, which is the IGUS H370.