Hi
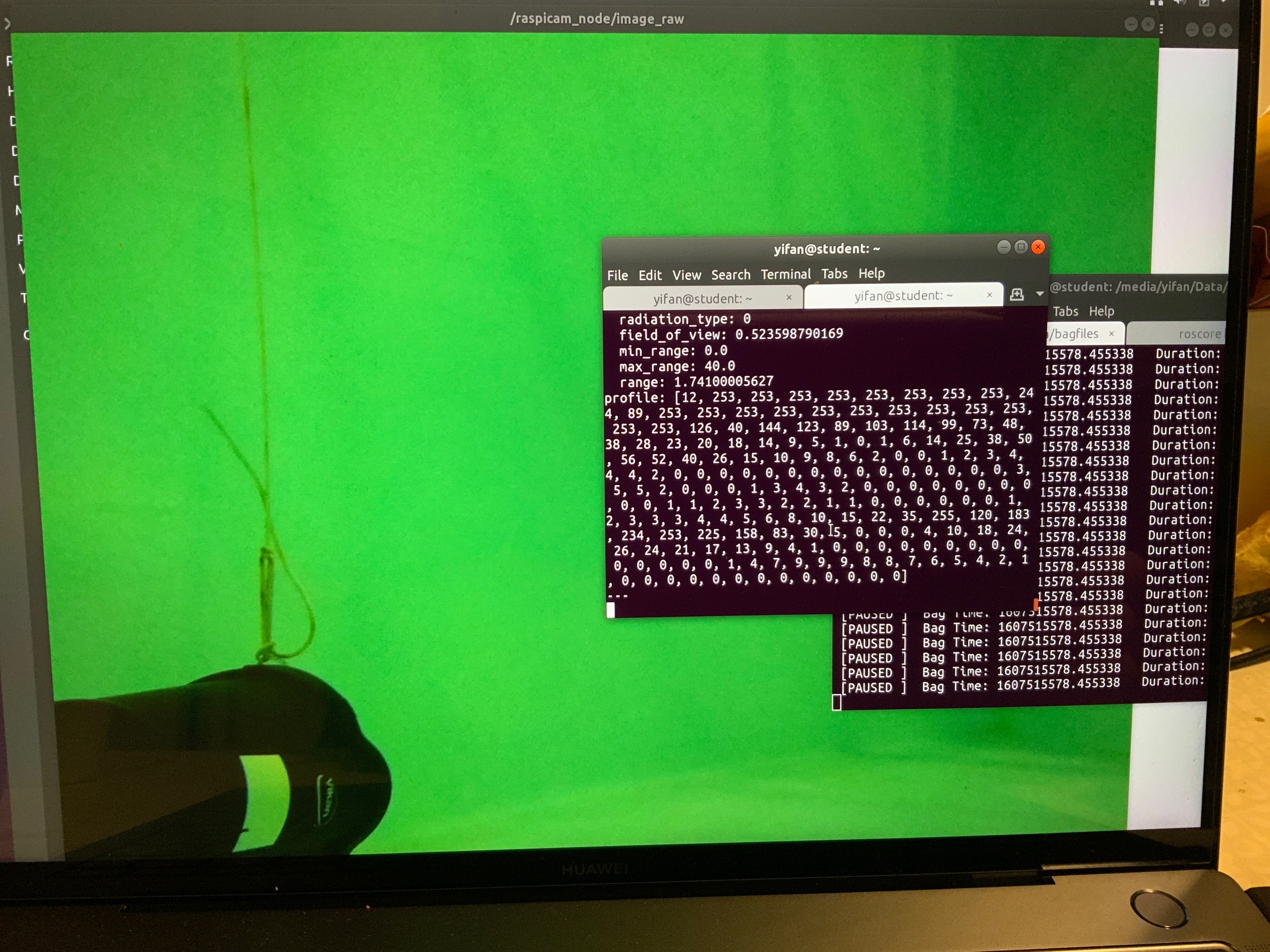
I am wondering how should I acquire the distance to an obstacle underwater rather than the bank of the pool by means of profile data
Have you tried using PingViewer to see what’s been implemented already by the bluerobotics team? You’ll likely want to do some kind of peak detection, but if PingViewer already does what you want then you can either use that directly, or inspect the source to see how it does its distance estimates.
There are different techniques to accomplish it using only video, you can use two lasers and calculate the distance based in the pixels distance between both points, or you could use optical flow with some IMU integration.