Hi Murf and Eliot,
That’s all really helpful, thanks for answering so quickly. Have read through … all makes good sense, but …
Can I give a bit of background as to where I’m coming from. Sorry, don’t wish to take up too much time, it’s gotten rather long.
My original idea was battery + throttle (variable resistor?) + motors, some wires, connect together, easy!
See one of my recent boats here.
This simple view was based on being familiar with auto / motorcycle electrical systems since the 1960s (I was even making transistor radios with discrete components then). But then I saw the T200, ah …
80s / 90s my professional work was in computing, mostly software, so the whole power electronic stuff that T200 uses passed me by (I remember seeing a huge cabinet, that had once housed a large mercury-arc glass rectifier, replaced with a small plastic block - I couldn’t get my head round why it didn’t just melt with the current).
I’m wary because, recently, I made a control system for charging 12v lead-acid batteries from two 135w solar panels and got in a mess. I hadn’t appreciated that the controllers were pulsing the power lines to send signals to each other and that these were confusing the USB step-down chargers I was connecting to the batteries.
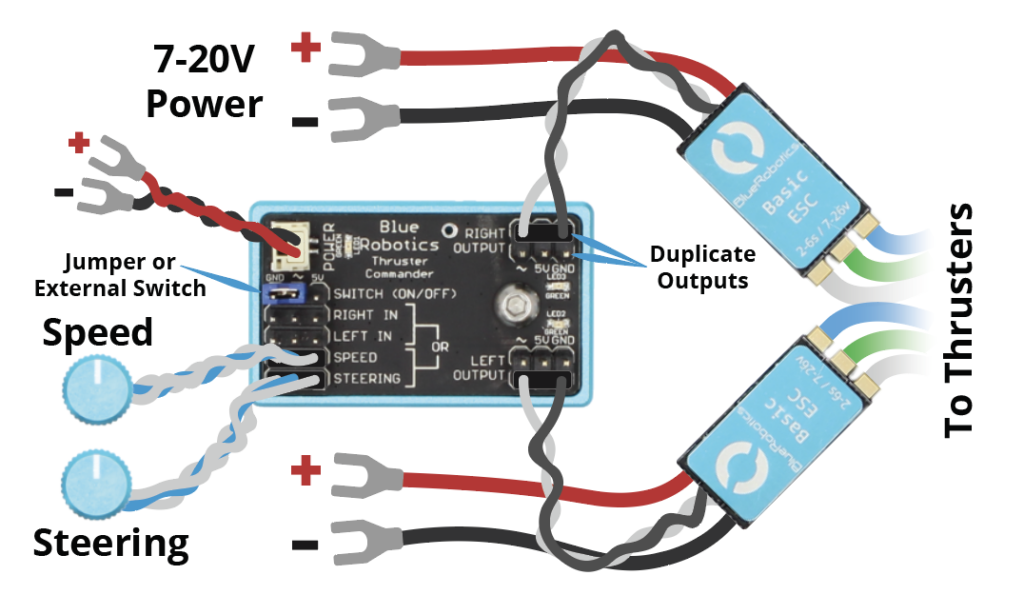
So, Blue Robotics powered boat then. I realise I don’t need ESCs (?) as I’d like to control the T200s ‘directly’ with a mechanical throttle. I can see now that something like the Thruster Commander is best between throttle, battery(ies) and T200s. But:
-
What kind of thing would do for the ‘mechanical’ throttle that’s not one of the devices shown in the Technical Specifications?
-
Do I have to use an ESC? I’m guessing the Thruster Commander replaces that?
-
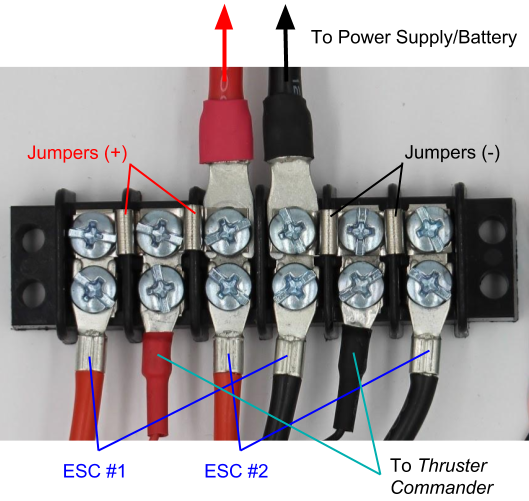
I’m not understanding where the battery voltage controllers sit in the circuit, or even what type to buy - especially want to avoid the cheap ones;
-
I’d like to use 2 identical 12v ‘leisure’ batteries in series for simplicity (trying to avoid the mini-computer that sits inside every Lithium battery) … though understand from the power curves that 2 in parallel gives a thrust / endurance trade-off;
Looking at other non-RoV DIY posts, some folks seem to be getting into a mess and short-circuiting things.
So, to avoid joining their numbers (!), have you produced any pages with sets of sample circuits for different applications to study?
Thanks so much … apologies if this has already been clearly answered somewhere!
Ciao, CaptainK
PS: murf, thanks for the tip, I’ll ring Buccaneer when I understand better what to ask for! 

{kind=link}
{kind=link}