Hi Julian, there are a number of possibilities that could be causing the reversal issue.
1: The joystick calibration was reversed
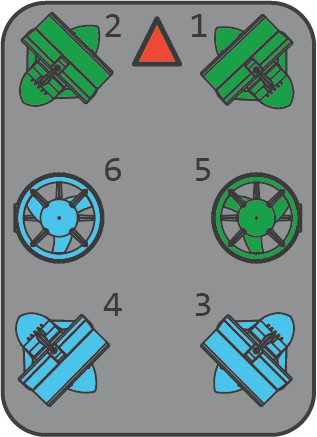
2: The motors are plugged into the wrong outputs (see here)
3: The motor directions are configured incorrectly
Here’s how to test each, I would test in this order, too.
-
In QGC, Open Widgets->Mavlink Inspector and expand the field that says RC_CHANNELS_RAW. When you move the strafe/lateral stick to the right, then the channel 7 value should INCREASE. If it doesn’t recalibrate the joystick and move the stick in the correct direction.
-
Trace the wires to the motor output pin on the Pixhawk autopilot. They should be set up according to this diagram. An alternative approach is to operate in Manual mode, unplug all of the motors from the autopilot, then plug them in one by one, making sure that the correct motor spins as you plug it in to the outputs.
-
Follow the directions here.
{kind=link}
To zero depth, search for the BASE_RESET parameter and set it to ‘Reset’, then power-cycle the ROV. In the next QGC release, you will be able to click a button in the sensor calibration page to reset the depth.